HIL Position Control Example
This example demonstrates how to do proportional control using the QUARC HIL command
set. It is designed to control Quanser's QUBE-SERVO2-USB experiment. The position of the
motor is read from encoder channel 0. Analog output channel 0 is used to drive the
motor.
System Requirements
This example requires hardware supported by the HIL command set, such as the QUBE-SERVO2-USB
device. Furthermore, the card must support task-based reading
of an encoder channel and immediate writes to an analog output channel.
Configuring the example
To set up the example for a different data acquisition card, edit the M-file and change
the board_type to the type of board being used. If you have more than
one of these data acquisition cards in your machine, then also change the board_identifier
variable to refer to desire board. Board identifiers are typically equal to the
board number, with the first board being board '0', the next board being board '1',
etc.
Running the example
Simply type the name of the example, hil_position_control_example,
at the Matlab command prompt to run the example. It will run until the Esc key is
pressed and then plot the results.

|
Do NOT press Ctrl+C to stop the script or the example will not stop the motor and
will not shut down the hardware correctly!
Use the
quanser.hardware.hil.close_all command in order to shut down the hardware if you have
pressed Ctrl+C.
|
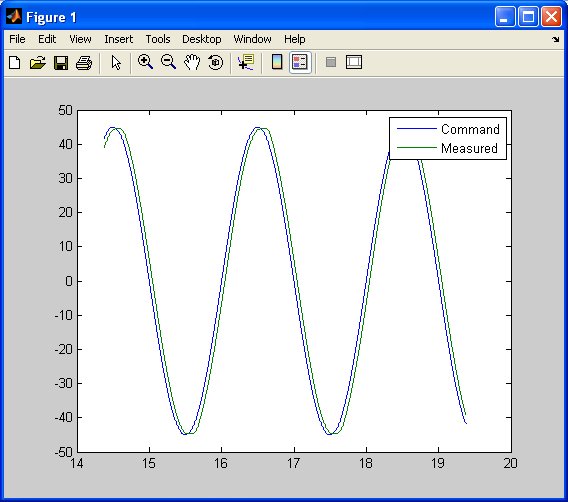
The QUBE-SERVO2-USB motor will move back and forth between +/-45 degrees. The controller
is running at 1 kHz.
The controller will run for 10 seconds and then stop. The example will zero the analog outputs
to stop the motor. It then plots the command signal versus the measured motor position,
as shown below.
Building code from the example
To build real-time code from the example for the QUARC Win64 target, execute the
following command in the MATLAB Command Window:
qc_build_script('hil_position_control_example', 'win64');
The command may also be entered in this form:
qc_build_script('hil_position_control_example.rt-win64');
The qc_build_script command generates a build script called 'hil_position_control_example_build.m'
and a main C file called 'hil_position_control_example_main.c'. It then invokes the build script to
generate C code for the MATLAB script and to compile and link it into a QUARC executable called 'hil_position_control_example.rt-win64'.
Running qc_build_script again will not overwrite the generated files, so they may be modified and
the changes will be incorporated when qc_build_script is run again.
Running the generated executable
Before running the generated executable, open a QUARC Console so that the output of the executable may be
seen. The QUARC Console need only be opened once. Use the command:
qc_script_console('hil_position_control_example.rt-win64', 'all');
The QUARC Console shows the standard output from any QUARC executable that is run on the target (since the 'all'
option was specified).
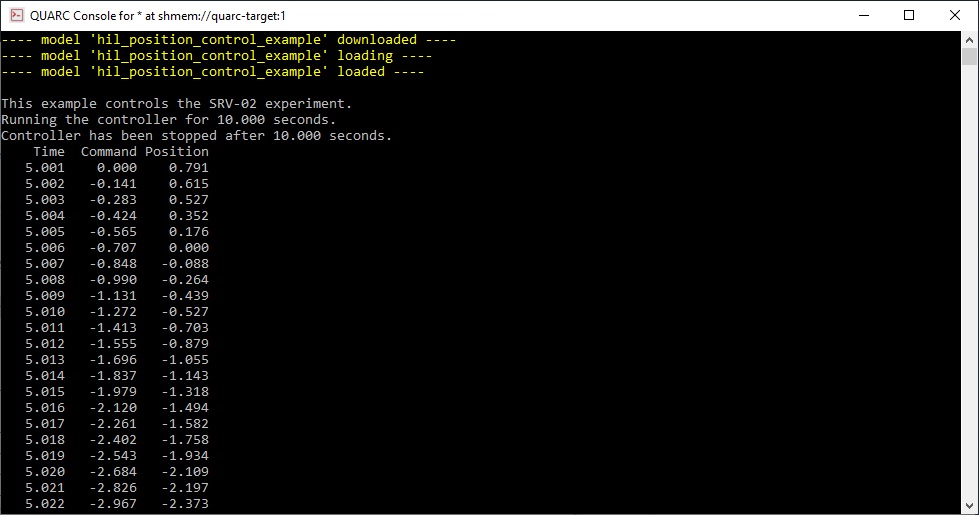
To run the generated executable, type the following command in the MATLAB Command Window:
qc_run_script('hil_position_control_example.rt-win64');
The output from the executable will be seen in the QUARC Console:
Building code for a different target
To build real-time code from the example for the QUARC Linux Pi 3 target, execute the
following command in the MATLAB Command Window:
qc_build_script('hil_position_control_example', 'linux_pi_3', 'update');
The command may also be entered in this form:
qc_build_script('hil_position_control_example.rt-linux_pi_3', 'update');
The 'update' option causes the qc_build_script command to update the
target type in the build script without rewriting the rest of the script. Hence, even if the script
has been modified, the changes will be preserved. Only the target type will be changed. The command
will then generate the C code for the MATLAB script and compile and link it for the new target type
to produce the executable 'hil_position_control_example.rt-linux_pi_3'.
Running the generated executable on the new target
Before running the generated executable, open a QUARC Console so that the output of the executable may be
seen. The QUARC Console for this new target need only be opened once. Use the command:
qc_script_console('hil_position_control_example.rt-linux_pi_3', 'all');
The QUARC Console shows the standard output from any QUARC executable that is run on the target (since the 'all'
option was specified). Note that even though the QUARC Console is running on the host PC, it will be
showing the standard output from QUARC executables run on the QUARC Linux Pi 3 target!
To run the generated executable, type the following command in the MATLAB Command Window:
qc_run_script('hil_position_control_example.rt-linux_pi_3');
The output from the executable will be seen in the QUARC Console.
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.