MATLAB Command Line
Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window:
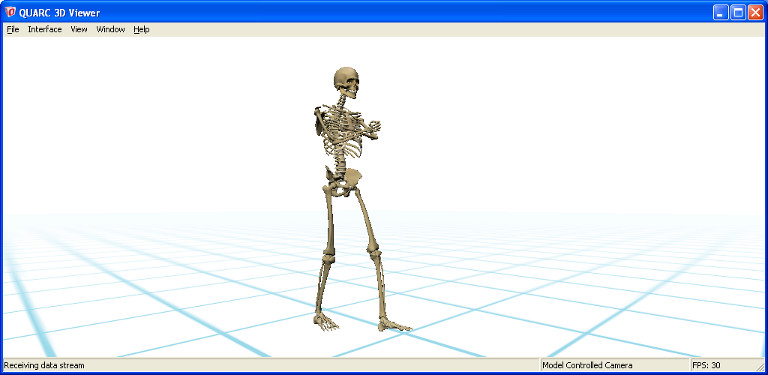
quarc_visualization_skeleton_walking_demoQUARC Visualization Skeleton Walking
This is an example of using real kinematic data to drive the included skeleton resource to help visualize human kinematic data. The source data was captured from NDI Optotrak cameras and then processed to apply spline patches to marker data that became obsured from the cameras. The resulting marker data is stored in the quarc_visualization_skeleton_walking.mat file with time in the first row followed by x, y, z triplets of position data for each marker. The markers map to the shoulder, hip, knee, ankle, and toe for both the left and right sides of the subject.
Using the processed marker data, the embedded Matlab block calculates a series of transformations and orientation vectors which are used to drive a modified version of the human_male.xml scene file included in the resources\scene_files folder. The arms have been statically placed in a crossed-arm position to represent what was actually done, and the first disc of the spine does not inherit orientation thus keeping the torso in an upright position regardless of the orientation of the lower limbs. Although the torso could be animated by adjusting the angle of every vertabrae to create a flexible spine, this was done to simplify the model.
The lower limbs are animated using a series of calculations to determine the angle between vectors from which transformation matrices or orientation vectors were calculated. Note that this was done using simplifications based on the subject walking in a straight line. It is not a general purpose mapping technique as-is. While it is certainly possible to fully articulate a human model using joint rotations as demonstrated here, the human body is not made of idealized ball-and-socket and pin joints which can result in motion artifacts in the animation that does not represent actual motion. A better visualization approach is use the animation data to drive the transformation of each bone independently (or at least with selective use of children) which would allow for the compression and non-ideal joint rotations of real human motion. The downside of this approach is that much more work is required to calculate all the transformations required, but the resulting animation will be relatively free of motion artifacts.
Demonstration
To start the model, click the button on the toolbar, select from the menu of the diagram, or press Ctrl+T while the diagram is the active window. Using the A, S, D, and W keys on your keyboard, you can move around the scene. Click-drag your mouse on the visualization window to rotate your view.
Note that the visualization may take a while to load since this is a very detailed model. By the defaults set for this model, the viewer will not close when the model stops, so you can just click Start on you model again and the viewer should automatically connect and you will see the entire animation. Alternatively, use external mode.
If you would like to run the model in external mode, then select from the menu of the diagram, or select from the simulation mode combo box on the toolbar.
Close the QUARC 3D Viewer.
Then select from the menu of the diagram, or press Ctrl+B while the diagram is the active window. A great deal of output will appear in the Diagnostic Viewer about the progress of the build. If you cannot see the Diagnostic Viewer, you can open it by selecting from the menu of the diagram, or clicking on the View Diagnostics hyperlink at the bottom of the diagram. If you have MATLAB R2013b or earlier then the output will appear in the MATLAB Command Window.
When the build is complete, click on the button or select from the menu of the diagram to connect to the model. This will load the code on the target and automatically open the visualization window on the host.
Finally, start the model by clicking on the button or selecting from the menu of the diagram. The item of the menu may also be used to both connect and start the model in one operation.
Click on the button or select from the menu of the diagram to stop the model. The item of the menu may also be used. Note that according to the defaults set in this model, the viewer will not close when the model stops.
By modifying the Camera Position constant to an integer between 0 and 3 inclusive, you can change the camera to different views.
Running the example on a different target
To run the example on a different target, refer to the instructions on the Running QUARC Examples on Remote Targets page.
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.