
CEAL CIGI Host
Sends position and orientation commands for the Ownship and Entity, requests for Height Above Terrain (HAT)/ Height Of Terrain (HOT), and generic data for Short Component Control to the CEAL Common Image Generator Interface (CIGI) Image Generator (IG).
Library
QUARC Applications/CEAL/User Interface/CIGI MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library_applications/CEAL/User Interface/CIGI')
Description
The CEAL CIGI Host block sends position and orientation commands for the Ownship and Entity, requests for HAT/HOT, and generic data for Short Component Control to the CEAL CIGI-compatible Image Generator (IG). It outputs the frame count, the period between two responses, the data rate, and the HAT/HOT responses from IG.
This block implements a subset of the Common Image Generator Interface (CIGI) framework and uses the UDP protocol to communicate with the IG.
Installation Requirements
QUARC Target Configuration
 The CIGI IG application typically runs on a remote system, whose IP address is entered on
the CEAL CIGI Host block dialog as one of its parameters.
The CIGI IG application typically runs on a remote system, whose IP address is entered on
the CEAL CIGI Host block dialog as one of its parameters.
Input Ports
ownship
A 6-element double vector representing the position (in meters) and orientation (in degrees) for the ownship entity.
The 6 elements are, in order, x, y, z, roll, pitch, yaw.
entity enable
This port appears when the Number of Moving Entities is set to non-zero. The width of the port must be the same size as the Number of Moving Entities, each element of the port indicates whether the particular entity is active or not.
entity position
This port appears when the Number of Moving Entities is set to non-zero. The width of the port must be the same size as the Number of Moving Entities multiplied by 6. Every 6 elements represent the x, y, z, roll, pitch, yaw of each Entity object. If the entity enable of the particular entity is 0, then the entity position of that entity is ignored.
HAT/HOT position
This port appears when the Number of HAT/HOT Requests is set to non-zero. The width of the port must be the same size as the Number of HAT/HOT Requests multiplied by 3. Every 3 elements represent the x, y, z offset from the ownship entity.
short component control
This port appears when the Number of Short Component Controls is set to non-zero. The width of the port must
be the same size as the Number of Short Component Controls multiplied by 6. Every 6 elements represent the
component id, instance id, component class, component state, and two int32 generic component data of each component to be controlled.
Output Ports
frame count
A int32 value representing the frame count of the CIGI IG.
The frame count indicates the timestamp of the current CIGI communication data message
from the CIGI host (e.g., motion system controller).
As long as the frame count value is incremented, the CIGI host and CIGI IG are communicating.
period
A double value representing the time difference (in seconds)
between receiving 2 Start-Of-Frame (SOF) packets from the IG system.
data rate
A double value representing the communication data rate to the IG system,
expressed in bytes per second (i.e., B/s or Bps).
This corresponds to the total number of bytes that are received and sent over one period.
HAT/HOT valid
This port appears when the Number of HAT/HOT Requests is set to non-zero.
A vector of uint32 values with width equals to the Number of Short Component Controls,
representing whether the HAT and HOT of ownship entity is valid or not.
HAT/HOT
This port appears when the Number of HAT/HOT Requests is set to non-zero.
A vector of double values with width equals to the Number of Short Component Controls multiplied by 2,
representing the HAT and HOT of ownship entity.
Parameters and Dialog Box
Required Pane
The Required pane of the dialog appears as follows:
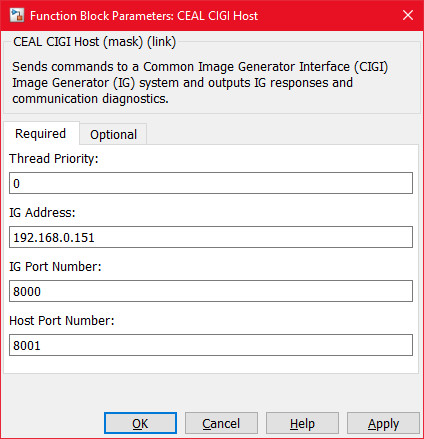
The Required tab contains the core settings for the communication to the IG.
Thread Priority (tunable offline)
The priority of the separate client thread used to communicate with the IG application. In general, a value of 0 indicates the lowest priority and higher values indicate a higher priority. The number of priority levels available depends on the type of QUARC target for which code is being generated.
IG Address
The IG IP address.
IG Port Number (tunable offline)
The UDP port number to use to communicate with the IG.
Host Port Number (tunable offline)
The UDP port number for the CIGI host system.
Optional Pane
The Optional pane of the dialog appears as follows:
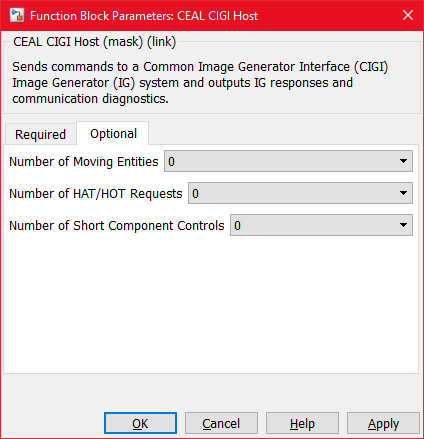
The Optional tab contains the optional settings for the communication to the IG, which include extra messages that can be communicated to the IG.
Number of Moving Entities
Allow setting a maximum of 6 moving entities' position (x, y, z) and orientation (roll, pitch, yaw).
Number of HAT/HOT Requests
Allow requesting a maximum of 4 points' HAT/HOT, where the points are defined by the x, y, z offsets from ownship entity.
Number of Short Component Controls
Allow setting a maximum of 6 componenets' data (component id, instance id, component class, component state,
and two int32 generic component data) via short component controls messages.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.