
Circular Buffer Clear
Clears a circular buffer.
Library
QUARC Targets/Advanced/Asynchronous MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Advanced/Asynchronous')
Description
The Circular Buffer Clear block clears the circular buffer when it's input is non-zero. The contents of the circular buffer are lost. This block is useful for "resetting" communications between threads.
Input Ports
clr
Whether to clear the circular buffer. The circular buffer is cleared whenever this input is non-zero.
Output Ports
This block has no output ports.
Data Type Support
This block supports any data type at its input.
Parameters and Dialog Box
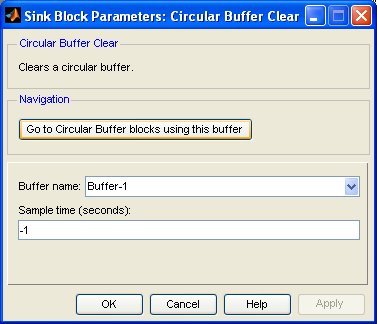
Go to Circular Buffer blocks using this buffer
Opens a dialog that lists all the Circular Buffer blocks in the model which are currently using the same interface selected in the Buffer name parameter. The dialog may be used to go to another Circular Buffer block in the model just by double-clicking on the name of the block in the dialog box.
Buffer name
The name of the circular buffer. This list of buffer names is derived from all the Circular Buffer Initialize blocks in the model.
Sample time
The sample time of the block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time.
A sample time of -1 indicates that the block inherits its sample time from its input.
To use the fundamental sampling time of the model, set the sample time to qc_get_step_size, which is a QUARC function that returns the fundamental sampling time of the model.
The default sample time is set to -1 because this block is typically used in a Function Call Subsystem attached to a Asynchronous Thread block.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.