
Debouncer
Debounces a switch signal.
Library
QUARC Targets/Discontinuities MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Discontinuities')
Description
The Debouncer block is able to determine the on/off state of a switch signal. When the input signal value retains above the preset Threshold for more than Rise time, the block determines the switch is on, likewise if the input signal value retains blow the preset Fall time, the block determines the switch is off.
Input Ports
input
The switch signal to be debounced.
threshold
The threshold value to determine the state of the switch. This port only appears when Source of parameters is set to
External input port.
rise time
The time frame the input signal is expected to bounce when switching from off to on.
This port only appears when Source of parameters is set to External input port.
fall time
The time frame the input signal is expected to bounce when switching from on to off.
This port only appears when Source of parameters is set to External input port.
Output Ports
output
The switch state determined by the block.
Parameters and Dialog Box
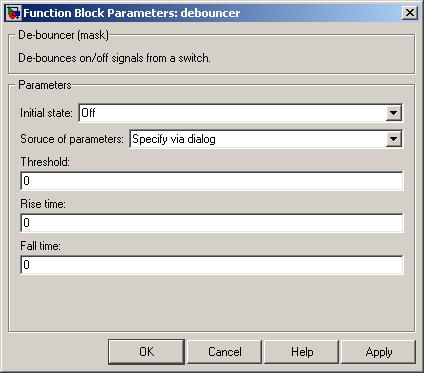
Initial state
Specifies the initial state of the input signal. The options are on and off.
Source of parameters
Specifies the source of parameters of the selected controller. The options are
Specify via dialog and External input port.
Threshold
If the average input signal amplitude is above this limit for too long (based on the Peak Time Limit) then the input signal is saturated to this value.
Rise time
The time frame the input signal is expected to bounce when switching from off to on.
This port only appears when Source of parameters is set to Specify via dialog.
Fall time
The time frame the input signal is expected to bounce when switching from on to off.
This port only appears when Source of parameters is set to Specify via dialog.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.