
Demultiplexer
Routes an input signal to one of several outputs based on a selection input.
Library
QUARC Targets/Signal Routing MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Signal Routing')
Description

The Demultiplexer block acts like a digital demultiplexer. It routes an input signal to one of several outputs based on the value of a selection input. The selection input is the zero-based index of the output port to which the input should be routed.
The state of the unselected outputs depends on the Output states parameter. If it is held then the unselected outputs retain their previous value. If it is reset to zero then they are reset to zero. Otherwise, if it is reset to port then the unselected outputs are reset to the value of the rst input.
Input Ports
in
The signal to be routed to an output.
sel
The selection input which determines the output port to which to route the input. A value of zero routes the in signal to the first output port. A value of one routes it to the second output port, etc. If the sel input is not a valid index then the outputs are left unchanged. This input must be a numeric scalar.
rst
The value to which to reset the unselected outputs. This port is only available when the Output states option is set to reset to port.
Output Ports
The number of outputs depends on the Number of output ports parameter. Each output has the same data type and dimensions as the signal connected to the in port.
Data Type Support
The Demultiplexer block supports any data type except fixed point, including complex and multidimensional signals, at the in port. The sel input may be any of the standard Simulink built-in numeric data types.
Parameters and Dialog Box
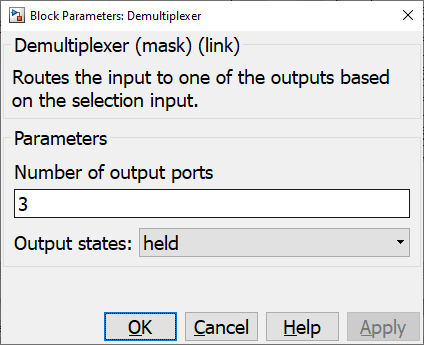
Number of output ports
The number of output ports to make available.
Output states
This option determines the state of the unselected outputs. The following table enumerates the semantics for each option:
|
Option |
Description |
|---|---|
|
held |
The unselected outputs hold their most recent value. |
|
reset to zero |
The unselected outputs are reset to zero. |
|
reset to port |
The unselected outputs are reset to the value of the rst port. |
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.