
Discretized State-Space
Implements a continuous-time state-space system in discrete-time.
Library
QUARC Targets/Discrete MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Discrete')
Description

The Discretized State-Space block converts a continuous-time LTI system in state-space form to a discrete-time state-space system according to the specified discretization method.
Installation Requirements
 In order to use the Discretized State-Space block, the
MathWorks Control System toolbox should be installed with your MATLAB software.
In order to use the Discretized State-Space block, the
MathWorks Control System toolbox should be installed with your MATLAB software.
Input Ports
The input signal to the transfer function.
Output Ports
The output signal from the transfer function.
Data Type Support
This block accepts input of type double. The output is of type double.
Parameters and Dialog Box
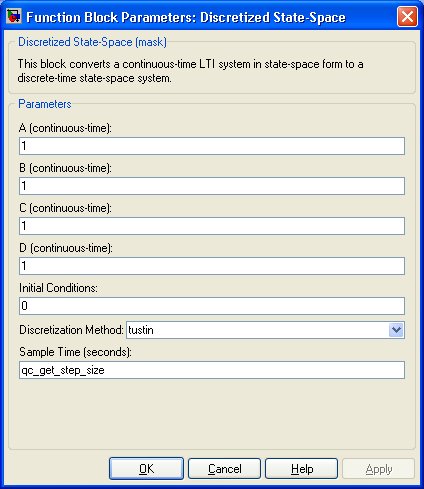
A
The A matrix for the continuous-time system. The A matrix appears in the state
equation x' = Ax + Bu.
B
The B matrix for the continuous-time system. The B matrix appears in the state
equation x' = Ax + Bu.
C
The C matrix for the continuous-time system. The C matrix appears in the state
equation y = Cx + Du.
D
The D matrix for the continuous-time system. The D matrix appears in the state
equation y = Cx + Du.
Initial Conditions
The initial states for the continuous-time system.
Discretization Method
The method used to discretize the continuous-time system. The methods provided with this block
are those supported by the c2d command with the exception of the prewarp method,
which is not supported by this block.
Sample Time
The sample time for the equivalent discrete-time system.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.