
Falcon
 The Falcon block is deprecated because the HDAL SDK required to use the block is no longer available
online. Novint's corporate website, www.novint.com, is also no longer available.
The Falcon block is deprecated because the HDAL SDK required to use the block is no longer available
online. Novint's corporate website, www.novint.com, is also no longer available.
Reads the current position and button states of the Novint Falcon and writes a force vector to the Falcon.
Library
QUARC Targets Deprecated/Devices/Third-Party/Novint MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library_deprecated/Devices/Third-Party/Novint')
Description
The Falcon block reads the current state of the Falcon on the target and outputs the position and button information. There are four buttons on the Falcon. It also writes the forces given at the input to the Falcon.
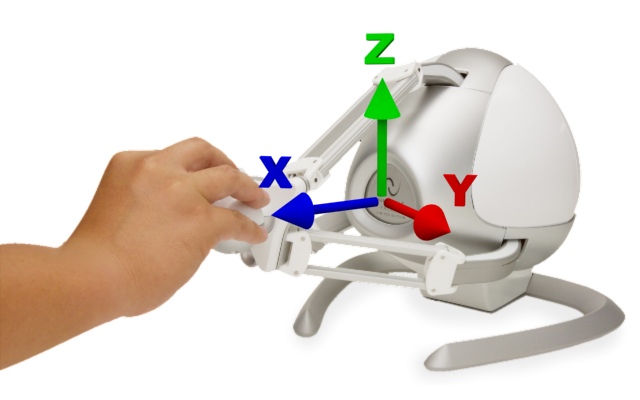
The position of the Falcon is output as a 3-vector containing the X, Y, and Z position in Cartesian coordinates (meters) using the axis shown below:
The button states are given as a vector of boolean values indicating whether a button is currently pressed (true) or not (false). Note that the coordinates and button states are valid only at the current sampling instant. The block parameters allow the user to specify the sampling time.
The forces to produce on the Falcon must be specified as a 3-vector in X, Y and Z Cartesian coordinates.
Installation Requirements
Real-Time Code
 In order to generate real-time code using the Falcon block,
the Falcon HDAL SDK must be installed. The HDAL SDK may be downloaded from
http://www.novint.com/index.php/support/downloads.
In order to run the device, the manufacturer's device driver must be installed on the target.
In order to generate real-time code using the Falcon block,
the Falcon HDAL SDK must be installed. The HDAL SDK may be downloaded from
http://www.novint.com/index.php/support/downloads.
In order to run the device, the manufacturer's device driver must be installed on the target.
After installing the HDAL SDK, create an environment variable called NOVINT_SDK and assign it to
the installation location of the HDAL SDK. Create an environment variable by right-clicking on My Computer and
selecting from the context menu. Then select the Advanced
tab and click on the button. Click under
the System variables section and assign NOVINT_SDK as the variable name and
the installation path, such as C:\Program Files\Novint\HDAL_SDK_2.0.0 to the variable value. Click OK until
the Properties dialog has been closed.
Also add the following directory to the PATH environment variable: "%NOVINT_SDK%\bin". Do not forget
to separate this entry from other folders in the PATH using a semicolon.
You will have to reboot the computer for the changes in the environment variables to take effect.
Input Ports
force
A three-vector of double-precision values representing the X, Y, and
Z forces applied to the Falcon end-effector in Newtons.
Output Ports
position
A three-vector of double-precision values representing the X, Y, and
Z Cartesian coordinates of the Falcon end-effector in metres.
buttons
A 4-element vector of boolean values representing the states of up to four Falcon
buttons. Each element in the vector is true if the button is being
pressed at the current sampling instant and false if the button is
not being pressed at the current sampling instant.
calibrated
A boolean value indicating whether the Falcon has been calibrated. This is also indicated by the color of the
Novint "badge" on the front of the device when a controller starts running. Red indicates the device is uncalibrated, blue
indicates the device is calibrated. If the device is uncalibrated, move the handle of the Falcon in and out to the extremities
of its workspace until the badge turns blue. No forces will be applied until the device is calibrated.
Parameters and Dialog Box
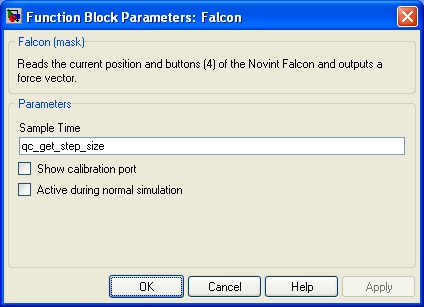
Show calibration port
Enable this option to show the calibration port. The calibration port indicates whether the Falcon has been calibrated.
Sample time
The sample time of the block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time.
A sample time of -1 indicates that the block inherits its sample time. Since this is a source block, only inherent the sample time when it is placed in a conditionally executed subsystem, like a Triggered or Enabled Subsystem, or in a referenced model.
The default sample time is set to qc_get_step_size, which is a QUARC function that returns the fundamental sampling time of the model. Hence, the default sample time is a discrete sample time with the same sampling time as the fixed step size of the model.
Active during normal simulation
Indicates whether this block should access hardware during normal simulation. If this option is checked then the Falcon will be controlled by this block during normal simulation. Such access is convenient for verifying that information is retrieved from the Falcon properly. However, the forces to the Falcon should generally not be driven during normal simulation to avoid damage to the device, since a normal simulation does not run in real time.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
No |
No |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
No |
No |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.