
Haptic 5-DOF Wand Cartesian Plant
Represents the Quanser Haptic 5-DOF Wand in Cartesian coordinates
Library
QUARC Targets/Devices/Quanser/Haptics/Pantographs/Haptic 5-DOF Wand/Interfacing MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Devices/Quanser/Haptics/Pantographs/Haptic 5-DOF Wand/Interfacing')
Description
The Haptic 5-DOF Wand Cartesian Plant block represents
Quanser's Haptic 5DOF Wand in Cartesian space so that control may be done in task space
rather than joint space. It takes the X, Y, Z forces to be exerted in Cartesian space, as
well as the torques for the other two degrees-of-freedom, and outputs the voltages necessary
to drive the amplifiers to produce those forces and torques. It also takes the encoder readings
from the joints and outputs the end-effector coordinates in Cartesian space. Forces are
expressed in N and torques in N-mm. The end-effector coordinates
are expressed in mm for the X, Y and Z coordinates, and in radians for the
yaw and roll coordinates. Use HIL blocks to read the encoders of the Haptic 5-DOF Wand
and write the voltages to analog outputs driving the Haptic 5-DOF Wand amplifiers.
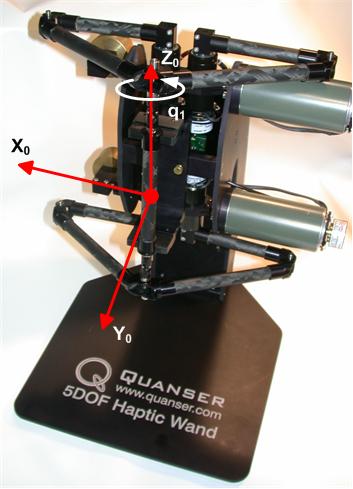
For the Quanser Q8 card, analog output channels 0 through 5 are typically used to write to the six joint motors of the Quanser Haptic 5-DOF Wand, with channels 0 through 5 corresponding to the joints in the required order of top-left-small, top-right-small, bottom-left-small, bottom-right-small, top-big, bottom-big respectively. Likewise, encoder input channels 0 through 5 are typically used to read the encoder counts of the same six joints. The reference frame is shown below:
Input Ports
forces
The forces and torques in Cartesian coordinates with which to drive the Haptic 5-DOF Wand end-effector. The input is a 5-vector, with the first three elements being the X, Y and Z forces in N and the last two elements being the yaw and roll torques in N-mm.
encs
The raw encoder counts measured from the six joints. The encoder counts must be input as a 6-vector in order of the joints, i.e., top-left-small, top-right-small, bottom-left-small, bottom-right-small, top-big, bottom-big. The 4X quadrature mode must be used when reading the encoders.
Output Ports
coords
The Cartesian coordinates of the end-effector of the Haptic 5-DOF Wand. The first three elements are the X, Y and Z coordinates in mm and the last two elements are the yaw and roll orientations in radians.
volts
The voltages required at the analog outputs to produce the desired motor currents for the six joints. The voltages are output as a 6-vector in order of the joints, i.e., top-left-small, top-right-small, bottom-left-small, bottom-right-small, top-big, bottom-big.
Data Type Support
This block supports inputs and outputs of type double.
Parameters and Dialog Box
The Haptic 5-DOF Wand Cartesian Plant block has no parameters.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.