
Haptics
Creates forces for haptics applications.
Library
QUARC Targets/Devices/Quanser/Virtual Plants MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Devices/Quanser/Virtual Plants')
Description
The Haptics block is able to depict three different shapes, Simple wall, Wall, and sphere. Based on the shape selected,
and parameters provided, this block calculates the interactive forces between the shape and the haptics devices.
Input Ports
position
The position of the tip of the haptics device.
velocity
The velocity of the tip of the haptics device.
setpoint
When the Shape is selected as Simple wall or Wall, the setpoint is the center of the wall.
When Shape is Sphere, this port will not show.
This port only appears when the Source of parameters is selected as External input port.
direction
When the Shape is selected as Wall, the direction is a vector defines the direction of the wall.
When Shape is Sphere or Simple wall, this port will not show.
This port only appears when the Source of parameters is selected as External input port.
center
When the Shape is selected as Sphere, the center port defines the center of the sphere.
When Shape is Wall or Simple wall, this port will not show.
This port only appears when the Source of parameters is selected as External input port.
radius
When the Shape is selected as Sphere, the center port defines the radius of the sphere.
When Shape is Wall or Simple wall, this port will not show.
This port only appears when the Source of parameters is selected as External input port.
stiffness
This port defines the stiffness of the object material.
This port only appears when the Source of parameters is selected as External input port.
damping
This port defines the damping ratio.
This port only appears when the Source of parameters is selected as External input port.
Output Ports
force
The interactive force between the object and the tip of the haptics device.
contact
Returns 1 if the haptics device touches the object, 0 otherwise.
Parameters and Dialog Box
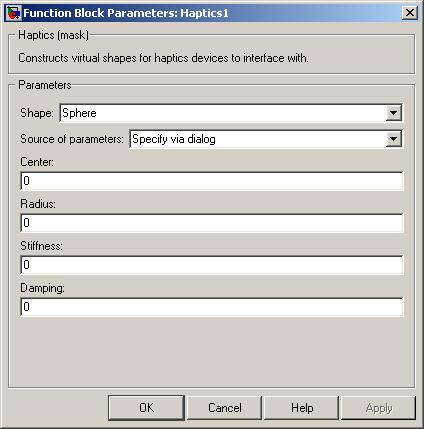
Shape
This parameter defines the shape of the object, currently supported objects are Simple wall, Wall, and Sphere.
Simple wall is different from Wall that it doesn't have Direction, which defines the direction the
Wall is facing. In Simple Wall the wall is facing directly to the user.
Source of parameters
Specifies the source of parameters of the selected controller. The options are Specify via dialog and External input port.
Setpoint (tunable online)
When the Shape is selected as Simple wall or Wall, the setpoint is the center of the wall.
When Shape is Sphere, this parameter will not show.
This parameter only appears when the Source of parameters is selected as Specify via dialog.
Direction (tunable online)
When the Shape is selected as Wall, the direction is a vector defines the direction of the wall.
When Shape is Sphere or Simple wall, this parameter will not show.
This parameter only appears when the Source of parameters is selected as Specify via dialog.
Center (tunable online)
When the Shape is selected as Sphere, the center parameter defines the center of the sphere.
When Shape is Wall or Simple wall, this parameter will not show.
This parameter only appears when the Source of parameters is selected as Specify via dialog.
Radius (tunable online)
When the Shape is selected as Sphere, the center parameter defines the radius of the sphere.
When Shape is Wall or Simple wall, this parameter will not show.
This parameter only appears when the Source of parameters is selected as Specify via dialog.
Stiffness (tunable online)
This parameter defines the stiffness of the object material.
This parameter only appears when the Source of parameters is selected as Specify via dialog.
Damping (tunable online)
This port defines the damping ratio.
This parameter only appears when the Source of parameters is selected as Specify via dialog.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.