
Kinect Initialize
Initializes a Kinect sensor and associates a name with the sensor.
Library
QUARC Targets/Multimedia MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Multimedia')
Description

The Kinect Initialize block associates a name with a particular Kinect sensor. The name specified in the Kinect name parameter will be the name of the Kinect sensor. This name will appear in the list of Kinect sensors for every other Kinect block. Using a separate block to configure the Kinect sensor makes it trivial to change the Kinect sensor being used.
The current state of the Kinect sensor is output at the status port. The possible status values are:
|
Connection State |
Value |
Description |
|---|---|---|
|
KINECT_STATUS_READY |
0 |
Kinect is valid and properly connected. |
|
KINECT_STATUS_INITIALIZING |
1 |
Kinect is initializing. |
|
KINECT_STATUS_NOT_CONNECTED |
2 |
Kinect is not connected. |
|
KINECT_STATUS_NOT_GENUINE |
3 |
Kinect is not a genuine Kinect sensor. |
|
KINECT_STATUS_NOT_SUPPORTED |
4 |
Kinect is an unsupported model. |
|
KINECT_STATUS_INSUFFICIENT_BANDWIDTH |
5 |
Kinect is connected to a hub that does not have sufficient bandwidth. |
|
KINECT_STATUS_NOT_POWERED |
6 |
Kinect is connected but unpowered. |
|
KINECT_STATUS_NOT_READY |
7 |
Kinect is not ready for some unspecified reason. |
Limitations
Kinect for Xbox 360
 The Kinect for Xbox 360 can only be used in Windows if the Kinect SDK is installed, which contains the Kinect for Xbox 360 driver.
The Kinect for Windows is recommended for use in Windows, while the Kinect for Xbox 360 may be used on the QUARC Linux DuoVero target.
The Kinect for Xbox 360 can only be used in Windows if the Kinect SDK is installed, which contains the Kinect for Xbox 360 driver.
The Kinect for Windows is recommended for use in Windows, while the Kinect for Xbox 360 may be used on the QUARC Linux DuoVero target.
Input Ports
This block has no input ports.
Output Ports
status
A int32 status code indicating the current status of the Kinect sensor. The different status codes and their values are given in the table above in the Description section.
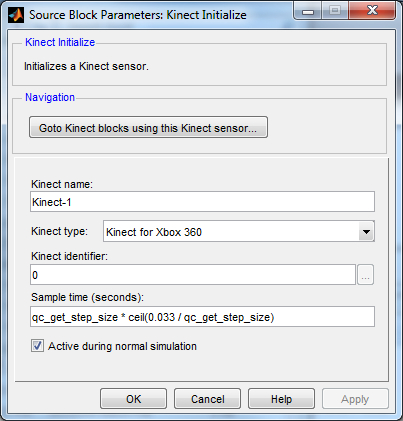
Parameters and Dialog Box
Goto Kinect blocks using this Kinect sensor
Opens a dialog that lists all the Kinect blocks in the model which are currently using the same kinect selected in the Kinect name parameter. The dialog may be used to go to another Kinect block in the model just by double-clicking on the name of the block in the dialog box.
Kinect name
A name used to identify this Kinect sensor. This name is used by other Kinect blocks to refer to this sensor.
Kinect type
This parameter selects the type of Kinect sensor. This parameter is only used to control what features are enabled, since the two types of Kinects have slightly different feature sets.
Kinect identifier (tunable offline)
Identifies which Kinect sensor should be used when there are multiple Kinect sensors attached to the system. If the identifier is an integer then it indicates the number of the Kinect, with Kinect sensors being numbered from zero. Hence, "0" would indicate the first Kinect sensor found. If the identifier is a string then the string should correspond to the identifier of the Kinect sensor itself.
Sample time
The sampling period (in seconds) of the Kinect Initialize block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time.
A sample time of -1 indicates that the block inherits its sample time. Since this is a source block, only inherent the sample time when it is placed in a conditionally executed subsystem, like a Triggered or Enabled Subsystem, or in a referenced model.
The default sample time is set to qc_get_step_size * ceil(0.033 / qc_get_step_size). The qc_get_step_size function is a QUARC function that returns the fundamental sampling time of the model. Hence, the default sample time is a discrete sample time which is a multiple of the fixed step size of the model and close to 1/30 of a second.
Active during normal simulation (tunable offline)
Indicates whether this block should communicate during normal simulation. Other Host blocks in the model that are associated with this connection will not do anything in normal simulation unless this option is checked.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Fully supported. |
|
|
Yes |
Yes |
||
|
No |
No |
Not supported. |
|
|
No |
No |
Not supported. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
Fully supported. |
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Fully supported. |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.