
Leap Motion
Reads linear translation, rotation matrix and scale factor from Leap Motion detector.
 This block is currently a beta version. If you are using this block, we would appreciate any feedback at tech@quanser.com.
This block is currently a beta version. If you are using this block, we would appreciate any feedback at tech@quanser.com.
Library
QUARC Targets Beta/Devices/Third-Party/Leap Motion MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library_beta/Devices/Third-Party/Leap Motion')
Description
The Leap Motion block can be used to read linear velocity, rotation matrix and scale factor from Leap Motion detector. Also each output associates with a probability value for the user to distinguish the motion.
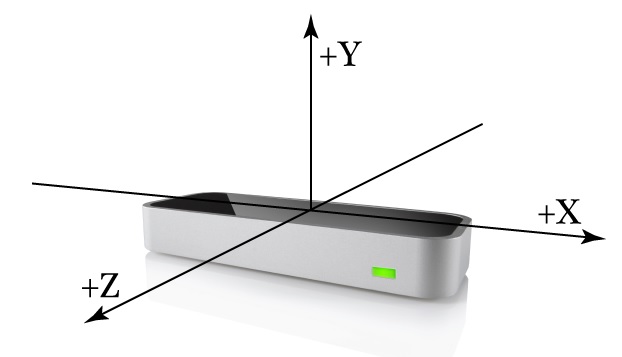
By default, the Leap Motion block uses right-handed coordinate system as shown below:
Limitations
Only one device supported!
 This block only supports one device attached to the PC target.
This block only supports one device attached to the PC target.
Installation Requirements
 In order to use the Leap Motion block, the Leap Motion driver version 2.3.1+31549 as well as development kit version 2.3.1+31549,
must be installed. Add the directory containing the Leap.dll file to the system
In order to use the Leap Motion block, the Leap Motion driver version 2.3.1+31549 as well as development kit version 2.3.1+31549,
must be installed. Add the directory containing the Leap.dll file to the system PATH environment
variable, e.g. C:\Program Files\LeapSDK\lib\x86 for 32-bit Windows, or
C:\Program Files\LeapSDK\lib\x64 for 64-bit Windows.
Input Ports
This block has no input ports.
Output Ports
lin
outputs the linear translation of hand motion from the previous sample.
lin_prob
outputs the probability that the motion is a linear translation. The value ranges from 0 to 1.
rot
outputs the rotation matrix of hand motion from the previous sample.
rot_prob
outputs the probability that the motion is a rotation. The value ranges from 0 to 1.
scale
outputs the scale factor of hand motion from the previous sample.
scale_prob
outputs the probability that the motion is a scalar movement. The value ranges from 0 to 1.
con
indicates if the Leap Motion device is connected.
err
outputs error.
Parameters and Dialog Box
The Leap Motion block has no parameters.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Not supported in a referenced model. Use in top-level model only. |
No multiple devices support. |
|
|
Yes |
Not supported in a referenced model. Use in top-level model only. |
No multiple devices support. |
|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
No |
No |
Not supported. |
|
|
Yes |
Yes |
||
|
No |
No |
Not supported. |
|
|
No |
No |
Not supported. |
|
|
Rapid Simulation (RSIM) Target |
No |
No |
Due to safety and liability concerns, the hardware may not be accessed during rapid simulation. |
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
No |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.