
Multistage Limiter
Limits the input value in two stages so that the input value is saturated to the peak limit for a limited time.
Library
QUARC Targets/Discontinuities MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Discontinuities')
Description

The Multistage Limiter block is like a two-stage saturation block. When the input exceeds the Continuous Limit, the block sets a timer to expire in the Peak Time Limit period. Before this timer expires, the block saturates the input to the Peak Limit. When the timer expires, the block determines whether the average input value over the Peak Time Limit period exceeds the Continuous Limit. If so, the block starts saturating the input value to the Continuous Limit. The block will hold to this lower limit until the Continuous Hold Time expires.
Input Ports
The input signal to be limited.
Output Ports
The output is the limited signal.
Data Type Support
This block accepts scalar and vector inputs of type double.
Parameters and Dialog Box
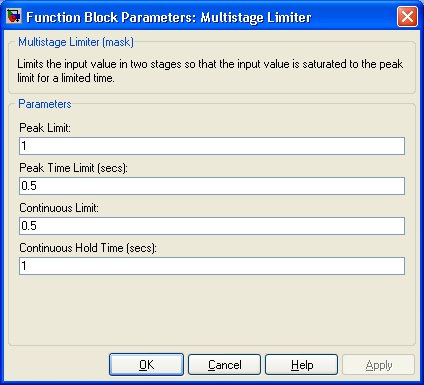
Peak Limit
Specifies the limit that is normally applied.
Peak Time Limit
Specifies the amount of time the Peak Limit will be applied before the signal is reduced to the Continuous Limit.
Continuous Limit
If the average input signal amplitude is above this limit for too long (based on the Peak Time Limit) then the input signal is saturated to this value.
Continuous Hold Time
Specifies the amount of time the input signal is saturated at the Continuous Limit. After this time frame, the input will be allowed to go above the Continuous Limit once again.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.