
PTI Visualeyez
Reads raw 3D marker position and rigid body position and orientation data from the Phoenix Technologies Incorporated Visualeyez tracker system.
Library
QUARC Targets/Devices/Third-Party/PhoeniX Technologies Inc./Interface MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Devices/Third-Party/PhoeniX Technologies Inc./Interface')
Description
The PTI Visualeyez block can be used to read marker positions that are setup as targets in the PTI VZSoft tracking software, as well as positions and orientations of rigid body objects that are setup in the PTI VZAnalyzer tracking software.
The PTI Visualeyez block may be configured to access the PTI tracking system locally (referred to as "direct access") or remotely. The choice of local or remote access is determined by the Source of URI parameter. If this parameter is set to None (direct access) then the PTI Visualeyez block attempts to access a PTI tracking system running on the same computer.
Any other value of this parameter causes it to use the given URI to contact a Quanser PTI Visualeyez Server application running on a remote computer to obtain the tracking data. In this case, the PTI VZSoft and/or VZAnalyzer tracking system software must be running on the remote computer.
The remote system is identified by a Universal Resource Identifier (URI), such as tcpip://remotehost:8000?nagle=no or udp://remotehost:9000. QUARC uses URI's for all its communications because it provides a uniform, extensible and flexible means of identifying the communication protocol to use and the associated communication parameters. Refer to Universal Resource Identifiers for more information.
The URI is specified in the URI of Quanser's PTI Visualeyez server parameter. The Quanser PTI Visualeyez Server application running on the remote tracking system must be configured with a compatible URI (typically the same URI).
 When the URI is specified as a dialog parameter and is not evaluated then the URI is configuration-dependent.
A separate URI may be entered for each model configuration as well as for normal simulation.
Thus, it is possible to employ a different URI for each target, without making a new diagram. The
URI that is entered becomes the URI for the currently active configuration when the Simulation mode
is set to . It becomes the URI for normal simulation when the Simulation
mode is set to .
When the URI is specified as a dialog parameter and is not evaluated then the URI is configuration-dependent.
A separate URI may be entered for each model configuration as well as for normal simulation.
Thus, it is possible to employ a different URI for each target, without making a new diagram. The
URI that is entered becomes the URI for the currently active configuration when the Simulation mode
is set to . It becomes the URI for normal simulation when the Simulation
mode is set to .
Installation Requirements
 In order to use the PTI Visualeyez block with marker data, the PTI VZSoft software version 2.90 must be installed and running. Before the
PTI Visualeyez block is able to read marker tracking data, VZSoft must be started so that it is actively capturing
data. Note that the configuration of the VZSoft software affects the target markers that will be tracked
and the units of the marker positions. The VZSoft units should be set to mm. See the VZSoft user manual for more information.
In order to use the PTI Visualeyez block with marker data, the PTI VZSoft software version 2.90 must be installed and running. Before the
PTI Visualeyez block is able to read marker tracking data, VZSoft must be started so that it is actively capturing
data. Note that the configuration of the VZSoft software affects the target markers that will be tracked
and the units of the marker positions. The VZSoft units should be set to mm. See the VZSoft user manual for more information.
In order to use the PTI Visualeyez block with rigid body data, the PTI VZAnalyzer software version 3.60 must be installed
and running. Before the PTI Visualeyez block is able to read rigid body tracking data, VZAnalyzer must be started so that
it is actively capturing data.
If this block is used with a URI for accessing a remote Visualeyez tracker system then the VZSoft and/or VZAnalyzer software
must be installed and running on the remote system. Furthermore, Quanser's PTI Visualeyez Server must also be running on
the remote system and be configured to use a compatible URI.
Input Ports
This block has no input ports.
Output Ports
m_xyz
A vector containing 3*n elements, where n is the number of markers
specified in the block parameters. Each group of 3 elements represents the xyz position coordinates
of a marker in meters; e.g., the output vector [x_1, y_1, z_1, x_2, y_2, z_2] contains the
xyz coordinates (x_1, y_1, z_1) and (x_2, y_2, z_2) for markers 1
and 2, respectively. If a marker is not detected in the current frame its xyz marker position holds its
previous value. Note that the markers selected depends on the channel numbers specified in the block's
Marker channel numbers parameter.
Note that the position units is specified in the VZSoft Data Units setting.
m_valid
A boolean vector indicating the detection status of each marker. The vector contains n
boolean elements, where n is the number of markers specified in the block parameters.
If element i (i = 1, .., n) is 0 (false) then marker i is not detected in the
current frame and its xyz position is not guaranteed to be valid. If element i is 1 (true)
then marker i is detected in the current frame and its xyz position is valid.
r_xyz
A vector containing 3*n elements, where n is the number of rigid body objects
specified in the block parameters. Each group of 3 elements represents the xyz position coordinates
of a rigid body in meters; e.g., the output vector [x_1, y_1, z_1, x_2, y_2, z_2] contains the
xyz coordinates (x_1, y_1, z_1) and (x_2, y_2, z_2) for rigid bodies 1
and 2, respectively. If a rigid body is not detected in the current frame its xyz position holds its
previous value. Note that the rigid bodies selected depends on the rigid body IDs specified in the block's
Rigid body IDs parameter.
r_xyzv
A vector containing 3*n elements, where n is the number of rigid body objects
specified in the block parameters. Each group of 3 elements represents the xyz velocities
of a rigid body in meters/second. If a rigid body is not detected in the current frame its xyz velocity holds its
previous value. Note that the rigid bodies selected depends on the rigid body IDs specified in the block's
Rigid body IDs parameter.
r_rot
A vector containing 3*n elements, where n is the number of rigid body objects
specified in the block parameters. Each group of 3 elements represents the roll, pitch, and yaw rotation angles
of a rigid body in radians; e.g., the output vector [r_1, p_1, y_1, r_2, p_2, y_2] contains the
rpy coordinates (r_1, p_1, y_1) and (r_2, p_2, y_2) for rigid bodies 1
and 2, respectively. If a rigid body is not detected in the current frame its rotation angle output holds its
previous value. Note that the rigid bodies selected depends on the rigid body IDs specified in the block's
Rigid body IDs parameter.
r_rotv
A vector containing 3*n elements, where n is the number of rigid body objects
specified in the block parameters. Each group of 3 elements represents the rotational velocities
of a rigid body in radians/second about the roll, pitch, and yaw directions, respectively.
If a rigid body is not detected in the current frame its rotational velocity output holds its
previous value. Note that the rigid bodies selected depends on the rigid body IDs specified in the block's
Rigid body IDs parameter.
r_pts
A vector containing n elements, where n is the number of rigid body objects
specified in the block parameters. Each element contains the number of points (markers) detected
for each rigid body in the order specified by the Rigid body IDs parameter.
This value can be used to guage whether the outputs for each rigid body are valid or not;
in general, the more markers used to measure the position and orientation of a rigid body the
more accurate the measurement becomes.
Note that the rigid bodies selected depends on the rigid body IDs specified in the block's
Rigid body IDs parameter.
r_new
A boolean vector indicating the status of each rigid body. The vector contains n
boolean elements, where n is the number of rigid bodies specified in the block parameters.
If element i (i = 1, .., n) is 0 (false) then there is no new data for rigid body i.
If element i is 1 (true) then there is new data available for rigid body i.
Note that the rigid bodies selected depends on the rigid body IDs specified in the block's
Rigid body IDs parameter.
Parameters and Dialog Box
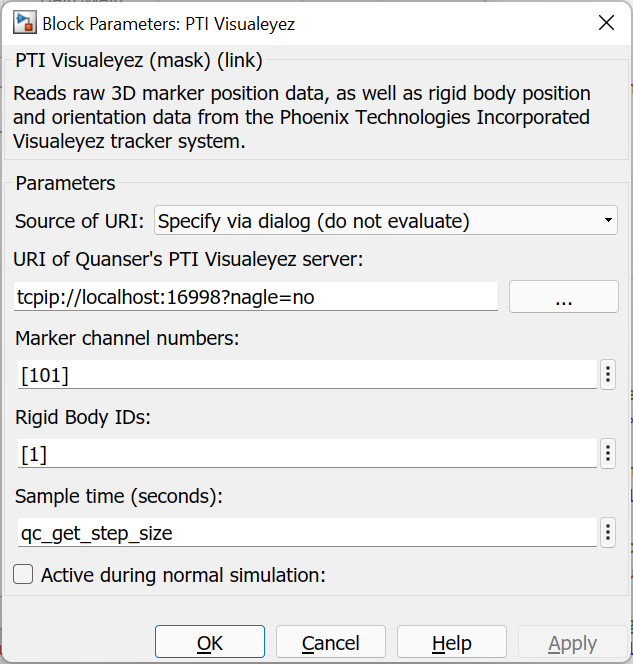
Source of URI
Indicates whether the URI should be determined from the dialog parameters or whether direct
access to the PTI tracking system should be used. If this field is set to
Specify via dialog (do not evaluate) then
the URI is specified via the URI of Quanser's PTI Visualeyez server
parameter. In this case, the URI is not evaluated as a MATLAB expression but is
interpreted as a literal string. However, format specifiers are recognized. Refer
to qc_perform_substitutions
for a list of the format specifiers available.
 If format specifiers which change frequently, such as '%{time}' or
'%{instance}', are used in the URI then the PTI Visualeyez block cannot be placed
in a referenced model, because the URI will change from the time the code is built to when
the code is run. As a result, Simulink will insist that the code be rebuilt because block
parameters in referenced models are inlined.
If format specifiers which change frequently, such as '%{time}' or
'%{instance}', are used in the URI then the PTI Visualeyez block cannot be placed
in a referenced model, because the URI will change from the time the code is built to when
the code is run. As a result, Simulink will insist that the code be rebuilt because block
parameters in referenced models are inlined.
If this field is set to Specify via dialog (evaluate) then the URI is also specified
via the URI of Quanser's PTI Visualeyez server parameter. However, in this case,
the URI is evaluated as a MATLAB expression. This option is convenient for using a variable
in the MATLAB workspace for the URI.
If this field is set to None (direct access) then the URI of Quanser's PTI Visualeyez server
parameter is ignored and the URI is not used. Instead, the PTI Visualeyez block accesses the
PTI tracking system software directly. This option is only supported when the tracking
system is running on the same computer.
URI of Quanser's PTI Visualeyez server (tunable offline)
The URI identifying the remote host to which to connect. This parameter identifies the communication protocol
and associated parameters. For example, tcpip://quanser-dev:18000?nagle=no
connects to the remote host called quanser-dev using TCP/IP on port 18000. This
field is only used if the Source of URI parameter
is set to Specify via dialog (do not evaluate) or Specify via dialog (evaluate).
Refer to Universal Resource Identifiers
for more information about URIs and the communications protocols supported by QUARC.
| When using TCP/IP, better latency performance is achieved if the Nagle algorithm is turned off. To disable the Nagle algorithm, add the "nagle=no" option to the URI. For example: tcpip://remhost:18000?nagle=no. |
Marker channel numbers (tunable offline)
A vector of integer channel numbers that selects the markers to be tracked. Valid channel numbers depend on the target control modules and LED channels being used in the VZSoft target sequence editor (see the VZSoft user manual for further information). The order in which the channel numbers are specified in this vector is the order that the xyz position elements will appear in the output vector m_xyz and m_valid.
If this vector is empty then no markers are tracked.
Rigid body IDs (tunable offline)
A vector of integer rigid body ID numbers that selects the rigid body objects to be tracked. Valid ID numbers depend on the rigid body definitions setup in VZAnalyzer (see the VZAnalyzer user manual for further information). The order in which the ID numbers are specified in this vector is the order that the position and orientation elements will appear in the output vectors r_xyz, r_xyzv, r_rot, r_rotv, r_pts and r_valid.
If this vector is empty then no rigid bodies are tracked and the VZAnalyzer application does not need to be running.
Sample time
The sample time of the block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time.
A sample time of -1 indicates that the block inherits its sample time. Since this is a source block, only inherent the sample time when it is placed in a conditionally executed subsystem, like a Triggered or Enabled Subsystem, or in a referenced model.
To use the fundamental sampling time of the model, set the sample time to qc_get_step_size, which is a QUARC function that returns the fundamental sampling time of the model.
Active during normal simulation (tunable offline)
Indicates whether this block should execute during normal simulation. If this option is not checked then the block will do nothing during normal simulation. This parameter has no effect on generated code.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
|
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Direct access is not supported, but it is possible to connect to a PTI tracking system on a Win-32 machine. |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.