
Quanser Standard Axes
Blocks provided by QUARC are designed around a standard set of axes. The intention is to make the transition from one device to another simpler by removing the potential complexity of different sets of axes. This standardization also means that for devices that have a predefined set of axes in their documentation, they may be overridden in order to conform to the Quanser standard axes. More information on a particular device's axes can be found on their respective help pages.
Vehicles
Ground, water, and air vehicles use the positive x direction as the direction for typical forward motion. The z direction is up, and the y direction is the cross product (typically to the left or port side of the vehicle). The reference frame is body-fixed.

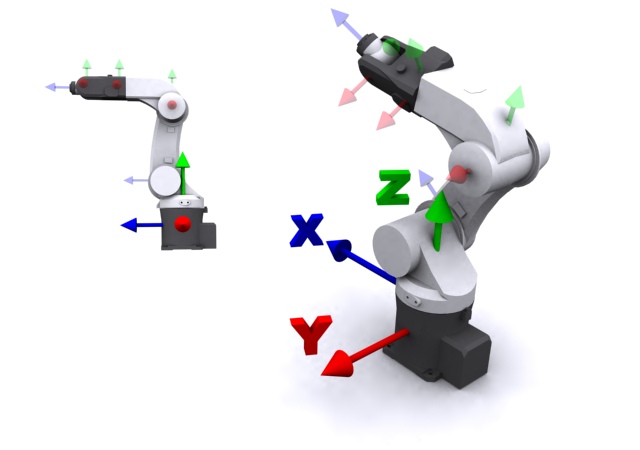
Manipulators
Given a robot in its default configuration, the positive x direction is towards the robot's typical workspace. The z direction is perpendicular to the base mounting, and the y direction is the cross product. Each linkage has the same body fixed frames. Refer to the specific device page to determine what is considered the default configuration.
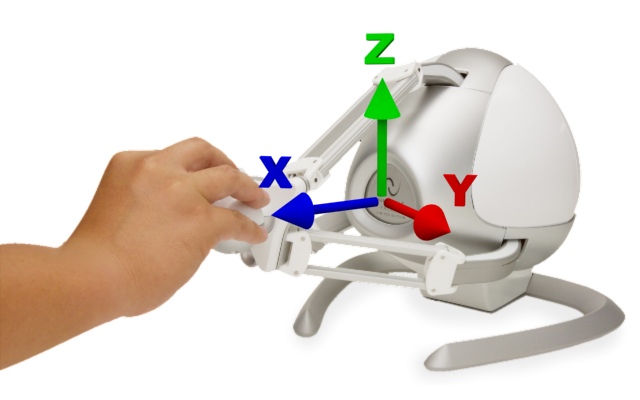
Haptic Devices
Haptic devices share the same axes definition as manipulators. For the default configuration, the positive x direction is towards the robot's typical workspace. From a user's perspective, the positive x is typically towards the user. The z direction is perpendicular to the base mounting, and the y direction is the cross product. Refer to the specific device page to determine what is considered the default configuration.
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.