
Repeating Chirp
Outputs a chirp signal (sine wave whose frequency increases linearly with time) repeatedly.
Library
QUARC Targets/Sources/Signals MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Sources/Signals')
Description

The Repeating Chirp block outputs a sine wave whose frequency increases linearly with time. This type of signal is called a "chirp" signal and is useful for spectral analysis of nonlinear systems. This block differs from the Chirp Signal MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: doc('chirp signal') block provided with Simulink in that it continuously repeats the sine sweep over the specified frequency range. The Simulink Chirp Signal block never repeats but continues to increase the sine wave frequency indefinitely.
 Note that the Repeating Chirp block uses absolute time, which may lead to inaccuracies when the model
is run for a long time.
Note that the Repeating Chirp block uses absolute time, which may lead to inaccuracies when the model
is run for a long time.
Input Ports
This block has no input ports.
Output Ports
out
The generated chirp signal.
Parameters and Dialog Box
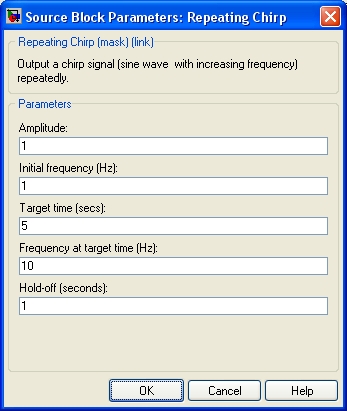
Amplitude
The amplitude of the chirp signal.
Initial frequency (Hz)
The initial frequency of the sine wave that is output.
Target time (seconds)
The number of seconds for the sine wave frequency to go from the initial frequency to the target frequency.
Frequency at target time (Hz)
The frequency of the sine wave when the target time is reached.
Hold-off (seconds)
The time to wait between frequency sweeps. The block holds the output zero for the hold-off time before starting the next frequency sweep.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.