
Roomba Create Trajectory
Calculates the robot's current (x, y) coordinate and orientation with respect to its initial pose.
Library
QUARC Targets/Devices/Third-Party/iRobot/Roomba/Applications MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Devices/Third-Party/iRobot/Roomba/Applications')
Description
The Roomba Create Trajectory block uses distance, and angle sensory data for continuous localization of the robot. The robot's coordinate is updated using the traveled distance and its current angular orientation with respect to its initial position. The updated coordinate may be inaccurate in case of wheel slip.
Input Ports
distance_fb
Distance sensory data returned by Roomba. Use Roomba Query List block to get the distance feedback.
angle_fb
Angle sensory data returned by Roomba. Use Roomba Query List block to get the angle feedback.
Output Ports
robot_x
Updated robot's x coordinate in mm. Use XY Figure to plot robot's trajectory.
robot_y
Updated robot's y coordinate in mm. Use XY Figure to plot robot's trajectory.
robot_theta
Updated robot's orientation coordinate in degrees.
Parameters and Dialog Box
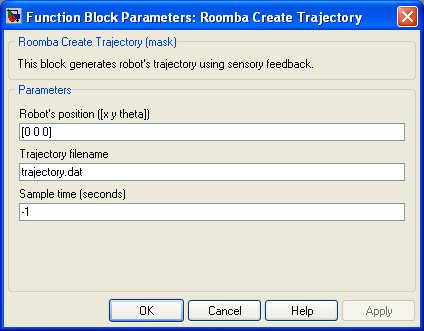
Robot's Position
The initial postion of the robot. It includes (x, y) coordinate (in mm) and orientation (in degrees) of the robot.
Trajectory filename
This file stores the updated robot's positions.
Sample time
The sample time of the block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time. A sample time of -1 indicates that the block inherits its sample time.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.