
Second-Order Low-Pass Filter
Models, in the continuous-time domain, a second-order low-pass filter characterized by a cut-off frequency and a damping ratio.
Library
QUARC Targets/Continuous MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Continuous')
Description
The Second-Order Low-Pass Filter block models, in the continuous-time domain, a second-order low-pass filter characterized by a cut-off frequency and a damping ratio. This block supports vector input signals and can have its filter Cut-off frequency, Damping ratio and Initial condition parameters set either internally using its dialog box or externally using input ports. The filtered output is always continuous even after any parameter change (e.g., Cut-off frequency and/or Damping ratio).
The transfer function for this filter is shown below:
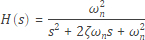
where ωn is the cut-off frequency and ζ is the damping ratio.
Input Ports
x
The input signal to the second-order low-pass filter.
wn
This port appears when the Source of parameters is set to External (input ports), and provides
the cut-off frequency (in radians per second, i.e., rad/s) of the second-order low-pass filter.
zt
This port appears when the Source of parameters is set to External (input ports), and provides
the damping ratio of the second-order low-pass filter.
x0
This port appears when the Source of parameters is set to External (input ports), and provides
the input signal initial condition to the second-order low-pass filter.
Output Ports
y
The (filtered) output signal from the second-order low-pass filter.
yd
The time-derivative of the output signal from the second-order low-pass filter.
Data Type Support
The block outputs are of type double.
Parameters and Dialog Box
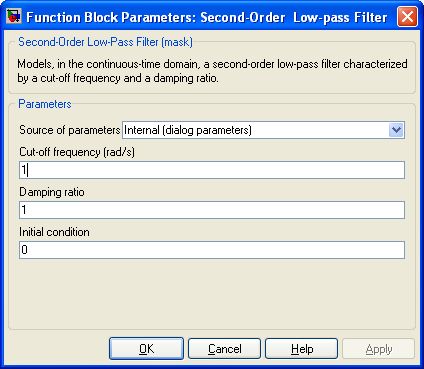
Source of parameters
The source of the continuous filter Cut-off frequency,
Damping ratio and Initial condition parameters is determined
by this field to be
to be Internal (dialog parameter) or External (block inputs).
Cut-off frequency (rad/s) (tunable online)
This parameter sets the cut-off frequency (in radians per second, i.e., rad/s) of the second-order low-pass filter.
Damping ratio (tunable online)
This parameter sets the damping ratio of the second-order low-pass filter.
Initial condition (tunable offline)
This parameter sets the initial condition of the second-order low-pass filter.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.