
SRV-02 Self-Erecting Inverted Pendulum
Computes the dynamics of the SRV02 Self-Erecting Inverted Pendulum.
Library
QUARC Targets/Devices/Quanser/Virtual Plants MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Devices/Quanser/Virtual Plants')
Description
The SRV-02 Self-Erecting Inverted Pendulum block computes the dynamics of the SRV02 Self-Erecting Inverted Pendulum. It takes a torque as input and produces the position and velocity of the arm and pendulum. Torque is used as the input so that different motor and amplifier models may be applied to simulate the torque, since some data acquisition cards generate a voltage output while others produce a current output.
Input Ports
tau
The torque applied by the SRV-02 base motor to the arm, in N-m.
Output Ports
theta
The angular position of the arm relative to the SRV-02 base, in radians.
alpha
The angular position of the pendulum relative to the downward (fallen) position, in radians.
theta_dot
The angular velocity of the arm in radians per second.
alpha_dot
The angular velocity of the pendulum in radians per second.
Data Type Support
This block supports scalar inputs and outputs of type double.
Parameters and Dialog Box
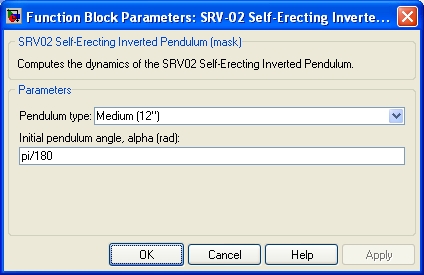
Pendulum type
The type of pendulum being used. There are two standard lengths available for the SRV-02 Self-Erecting Inverted Pendulum: a short, 7 inch pendulum and a medium, 12 inch pendulum.
Initial pendulum angle, alpha0 (rad)
The initial pendulum angle relative to the downward (fallen) position in radians. Do not specify an initial pendulum angle of zero unless your controller is designed to get the pendulum swinging. For example, a controller designed to swing the pendulum up could give the arm an initial impulse, or it could be a non-linear controller (such as fuzzy logic) that uses the upright position as its commanded position.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.