
Stall Monitor
Monitors whether a device has stalled. It is typically used to protect a device from overheating by stopping the model if the device is stalled for too long.
Library
QUARC Targets/Discrete MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Discrete')
Description
The Stall Monitor block is typically used to protect a device from overheating. For example, a DC servomotor should not be stalled for too long when the torque exceeds the continuous stall torque. The Stall Monitor can detect when a large torque is applied but the device is not moving. If this state continues for too long, it outputs true at its stalled port. This output can then be used to stop the model, issue an error message or take other corrective action.
The stall condition is detected when the control exceeds the Control threshold but the motion is less than the Motion threshold. For example, if the control is the torque applied to a servomotor then the Control threshold should be set to the continuous stall torque from the motor specification. The motion in this case should be the measured velocity of the motor and the Motion threshold should be the smallest velocity that can be measured. Hence, when the motor is not moving (as indicated by the motion being less than the Motion threshold) but a large torque is being applied (as indicated by the control exceeding the Control threshold) then the motor is considered stalled.
As soon as a stall condition is detected, the time for which it is continuously stalled is output at the time stalled port. If this time exceeds the Duration (Seconds) then the stalled output becomes true.
When the stall condition is not satisfied then the stalled output will be false and the time stalled output will be zero.
 This block does NOT stop the model, so it is the user's responsibility to check if the controlled device is stalled and take actions
accordingly.
This block does NOT stop the model, so it is the user's responsibility to check if the controlled device is stalled and take actions
accordingly.
Input Ports
control
This port is the control applied to the device. For example, this input may be the voltage applied to a servomotor.
motion
This port is the measured motion of the device being controlled. For example, this input may be the measured velocity of a servomotor in rad/s.
Output Ports
stalled
This port indicates whether the device has been stalled for the given Duration (Seconds) or longer. A device is considered stalled when the control exceeds the Control threshold, but the motion is less than the Motion threshold. In other words, a large control signal is being applied but the device is not moving.
time stalled
This port is the time in seconds for which the device has been stalled. This output is independent of the given Duration (s) so it counts up as long as the stall conditions are met. See the stalled help for the stall conditions.
Parameters and Dialog Box
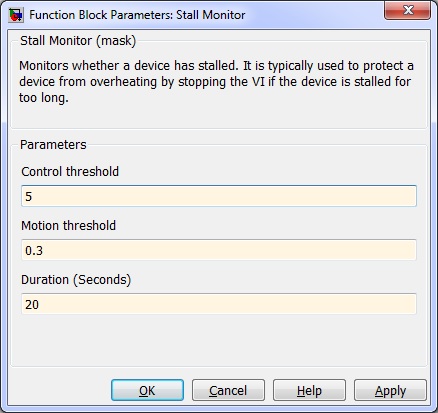
Control threshold
This is the threshold above which the control is considered high. For example, if the control is a voltage then the threshold would typically be the voltage corresponding to the continuous stall torque, which should not be exceeded in a stall condition.
Motion threshold
This is the threshold below which the Motion is considered stopped. It is typically set to the minimum velocity that can be measured for the device. For example, it may be the minimum angular velocity measurable for a servomotor in rad/s.
Duration (Seconds)
This is the time in seconds for which the device is allowed to be stalled. This input is usually set to the maximum time the device can be stalled before overheating, reduced by a safety margin.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.