
Stop with Error
Stops the model and issues an error message.
Library
QUARC Targets/Sinks/Error Handling MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Sinks/Error Handling')
Description

The Stop with Error block sets the error status of the model when its input is non-zero. A fixed error message string can be provided as the error message, or it can interpret its input as a standard QUARC error code and supply the corresponding error message. If the input is interpreted as an error code then only negative inputs cause the block to issue an error message. The model will stop and return the error message. The model termination code is run so that any cleanup or final outputs are performed.
Input Ports
This block has a single input port. The model is stopped with the error message when this input becomes non-zero or negative, depending on the setting of the Message type parameter.
Output Ports
This block has no output ports.
Data Type Support
The Stop with Error block accepts signals of any of the built-in Simulink data types at its input. Fixed point is not currently supported.
Parameters and Dialog Box
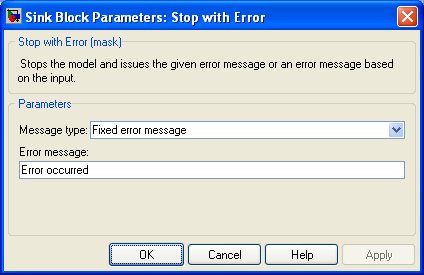
Message type
The type of error message to issue. If this parameter is set to Fixed error message then it uses the contents of the Error message parameter
as the error message. If the Message type parameter is set to Interpret input as error code then it interprets the input as a QUARC error code
and issues the corresponding error message.
Error message
The error message to issue when the model stops. The error message is treated as a string. It is not evaluated so Matlab workspace variables
cannot be used. This parameter is ignored if the Message type parameter is set to Interpret input as error code.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.