
Target Connect
Connects to a QUARC target.
Library
QUARC Targets/Advanced/Dynamic Reconfiguration MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Advanced/Dynamic Reconfiguration')
Description
The Target Connect block establishes a connection to a QUARC target. The name of the block is the name associated with the connection. Once a connection is established, the other dynamic reconfiguration blocks may be used to download code to the target, switch models on the target dynamically, etc. The connection is established when the model is started and closed when the model is terminated. Using connection names as an alias for the actual target URI allows the target URI to be changed in one place rather than in every block using the connection.
This block is part of the dynamic reconfiguration facilities of QUARC which allow running models to be swapped for another model on-the-fly. In particular, dynamic reconfiguration may be performed under the control of a supervisory model.
Models which will be dynamically reconfigured should have the Support dynamic reconfiguration option checked on the Code Generation/QUARC tab of the Configuration Parameters dialog.
Targets are identified by a Universal Resource Identifier (URI). QUARC uses URI's for all its communications because it provides a uniform, extensible and flexible means of identifying the communication protocol to use and the associated communication parameters. Refer to Universal Resource Identifiers for more information."
Input Ports
This block has no input ports.
Output Ports
This block has no output ports.
Parameters and Dialog Box
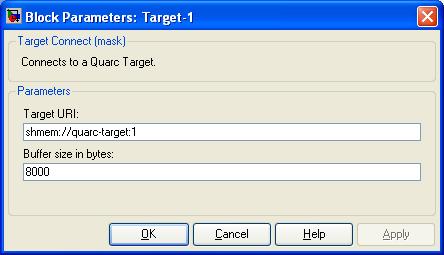
Target URI
The URI identifying the QUARC target to which to connect. For example, tcpip://quanser-dev:17000 connects
to the remote host called quanser-dev using TCP/IP on port 17000.
Buffer size
The size of the buffer used for communications. This buffer is independent of any buffering in the underlying communication protocol. Increasing the buffer size may increase performance.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.