
Threshold
This block checks the relation between the input signal and the preset threshold.
Library
QUARC Targets/Discontinuities MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Discontinuities')
Description
The Threshold block compares an input to the threshold. Specify how the comparison is done by selecting Relational operator from menu. Also the block records the time where the comparison is true, and checks if the time is within the specified Duration.
Input Ports
signal
Input signal.
threshold
The threshold for comparison. This port only appears when Source of parameters is set to
External input port.
duration
Time (in s) the comparison is true. This port only appears when Source of parameters is set to
External input port.
Output Ports
elapsed
Outputs 1 if the time of comparison being true exceeds the duration, otherwise 0.
time
Time the comparison being true. This time resets itself every time the comparison switches from true to false.
Parameters and Dialog Box
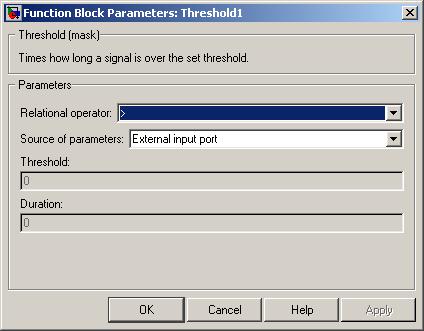
Relation operator
Select one of the following operators,
>, >=, <, <=,==, and ~=.
Source of parameters
Specifies the source of parameters of the selected controller. The options are
Specify via dialog and External input port.
Threshold (tunable online)
The threshold for comparison. This parameter only appears when Source of parameters is set to
Specify via dialog.
Duration (tunable online)
Time (in s) the comparison is true. This parameter only appears when Source of parameters is set to
Specify via dialog.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.