
VAL Initialize
Initializes a vehicle for use with the vehicle abstraction layer blocks.
Library
QUARC Targets/Vehicles/Configuration MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Vehicles/Configuration')
Description
The VAL Initialize block is used to initialize a vehicle and assign it a vehicle name to be associated with this configuration. The vehicle name given to this block will appear in the list of vehicles of all other VAL blocks.
To configure a vehicle, a vehicle type and autopilot type must be selected. The vehicle type and autopilot type allows this block to load the appropriate vehicle flight/simulation driver. In normal simulation, the vehicle is always simulated. In external mode, the vehicle may be used for real flight or simulation.
Input Ports
xyz
A 3-vector containing the current x, y, z position of the vehicle. This input port is available if the Position input parameter is selected. Some vehicles require that the current position be set from this input if they are performing waypoint navigation and do not have on-board localization capability.
Output Ports
This block has no output ports.
Parameters and Dialog Box
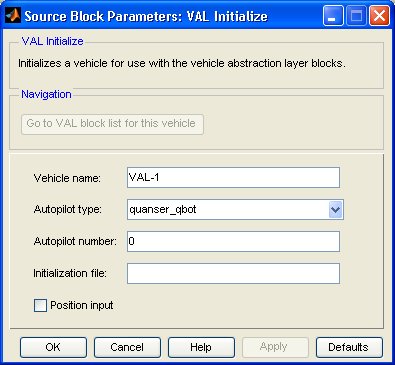
Go to VAL block list for this vehicle
This button displays a list of VAL blocks associated with this vehicle.
Vehicle name
The name associated with this vehicle configuration. This name is referenced by the other VAL blocks to identify the VAL Initialize block with which they are associated. This name must be unique throughout the model. No two VAL Initialize blocks may have the same vehicle name.
Autopilot type
The autopilot type is selected from a list of available vehicles. The autopilot type is used when initializing the vehicle or for loading a simulation driver.
Autopilot number
The number used to distinguish between multiple autopilots loaded within one model. This is implementation dependent and should be handled by the appropriate vehicle driver.
Initialization file
This is an optional parameter that contains the full path to a file that can be loaded by the VAL driver during initialization. The initialization file may be used to specify vehicle-specific parameters and is implementation dependent. Whether or not the file is loaded depends on the VAL driver implementation.
Position input
A checkbox that enables an xyz position input for the VAL Initialize block when checked. If this parameter is left unchecked, there is no xyz input. Some vehicles require that the current position be set from this input if they are performing waypoint navigation and do not have on-board localization capability.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.