
Vision Get Centroid Pose

|
This block is currently a beta version. If you are using this block, we would appreciate any feedback at tech@quanser.com. |
Calculates centroid of the specified binary blob(s).
Library
QUARC Targets Beta/Image Processing/Open Source Computer Vision MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library_beta/Image Processing/Open Source Computer Vision')
Description
The Vision Get Centroid Pose block takes a binary image as the input and calculates the centroid of the binary blob(s) according to the specified method. The outputs of this block include (x, y) coordinate of the centroid and its angular oriention with respect to the center of the input image.
In order to use this block, be sure to follow the instructions described on the Vision Capture Image page, and take careful note of the limitations.
Input Ports
image
A handle to a 8-bit binary image that uses OpenCV (Open Source Computer Vision) IplImage structure.
Output Ports
centroid_xy
(x, y) coordinate of the centroid.
centroid_ang
Horizontal and vertical angular deviations of the centroid with respect to the center of the image. Each pixel is mapped horizontally and vertically to an angular resolution with respect to the specified view angle of the camera. Then, horizontal and vertical angular deviations are calculated as: angular resolution x centroid coordinate.
err
This signal is negative in case of error.
Parameters and Dialog Box
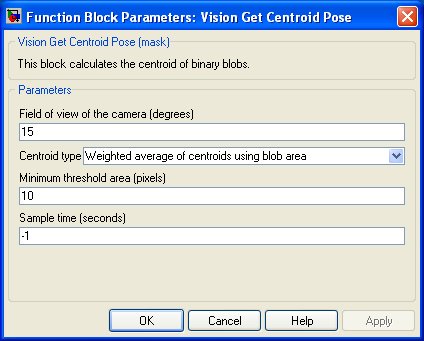
Field of view of the camera
Specifies the field of view of the camera in degrees. The parameter value must be 0 to 360 degrees.
Centroid type
Specifies the method of centroid calculation. The options are: Weighted average of centroids using blob area, Centroid of the largest blob, and Centroid of the closest path block. The first option considers binary blobs having areas greater than the minimum threshold area and calculated the weighted average of centroids. The second option calculates the centroid of the largest blob. The third option is suitable for path tracking, which gives the centroid of the binary blob closest to the center-bottom point of the image.
Minimum threshold area
Specifies the minimum threshold area in pixels. The binary blobs having areas less than the threshold value are discarded for centroid calculation. The parameter value must be less than 25 for "Centroid of the closest path block" option.
Sample time
The sample time of the block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time. A sample time of -1 indicates that the block inherits its sample time.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
No |
No |
Not supported. |
|
|
No |
No |
Not supported. |
|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
No |
No |
Not supported. |
|
|
Rapid Simulation (RSIM) Target |
No |
No |
Not supported. |
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.