
CAT5 World Coordinates to Joint Angles
Converts cartesian world coordinates to joint angles for the CRS Catalyst-5 robot.
Library
QUARC Targets/Devices/Third-Party/CRS/Robots/CAT5 MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Devices/Third-Party/CRS/Robots/CAT5')
Description
The CAT5 World Coordinates to Joint Angles block computes the joint angles that place the robot end-effector at the given position and orientation. Since there are singularities in the workspace, the block uses the previous joint angles to arrive at a suitable configuration. If there is no solution because a joint is out of range, or the given orientation is not achievable, or the world coordinates are out of the robot workspace, then the error output will be non-zero to indicate the error.
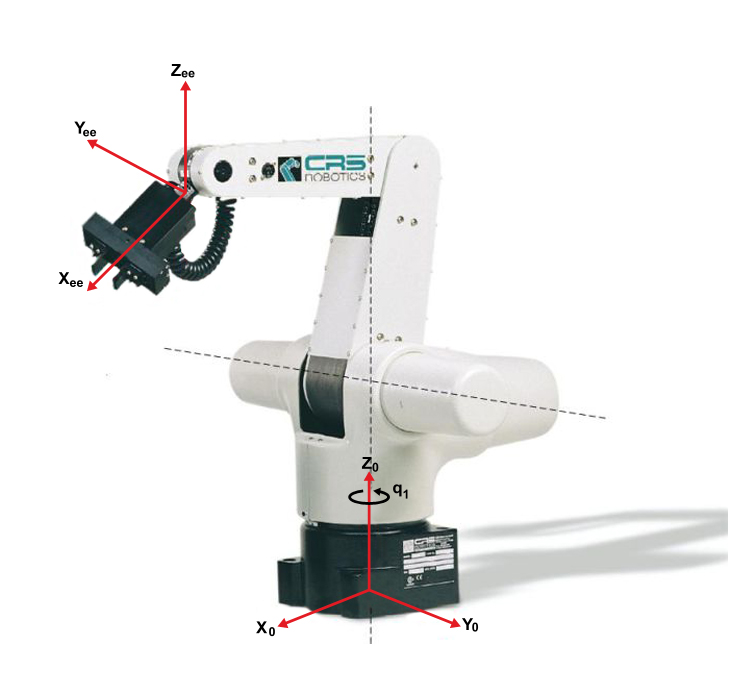
Note that the CAT5 Inverse Kinematics block is generally easier to use because it keeps track of the previous joint angles automatically. The reference frame is shown below:
Input Ports
world
A 5-vector containing the position and orientation of the robot end-effector. The vector elements represent the X, Y and Z cartesian coordinates of the end-effector in millimeters, followed by the pitch and roll respectively, in radians. Note that yaw is the rotation about the Z-axis, pitch is the rotation about the Y-axis and roll is the rotation about the X-axis.
tool
Three-element vector taht defines the dimension of the toolset attached to the end effector, if any.
Output Ports
Joint Angles
The joint angles (in radians) for the five Catalyst-5 joints. The joint angles are given as a 5-vector in order of the joints, i.e., base, shoulder, elbow, wrist pitch and wrist roll.
Error
A scalar denoting whether a solution could be found. An error code of zero indicates that a solution was found. The possible error codes and their meaning are listed in the table below.
|
Code |
Error |
|---|---|
|
0 |
No error. A solution was found. |
|
1 |
Out of range error. One or more joints have exceeded their positive or negative joint limits. |
|
2 |
Illegal transform. No valid inverse kinematics solution was found that fell within the joint limits. |
|
3 |
Out of reach. The given location is outside the workspace of the robot. |
Data Type Support
This block supports inputs and outputs of type double.
Parameters and Dialog Box
The CAT5 World Coordinates to Joint Angles block has no parameters.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.