
EtherCAT Write

|
This block is currently a beta version. If you are using this block, we would appreciate any feedback at tech@quanser.com. |
Writes the specified variables to the EtherCAT process image.
Library
QUARC Targets Beta/Fieldbus/EtherCAT MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library_beta/Fieldbus/EtherCAT')
Description

The EtherCAT Write block writes the specified variables to the process image every time the block is executed. It does not send or receive packets from the EtherCAT slaves but instead writes to the process image in the EtherCAT stack. The EtherCAT stack updates the process image in the slaves at the sampling rate specified in the EtherCAT Master block.
This block can write more than one variable at the same time. The variables are written to the process image immediately. Using this block is more efficient than using separate blocks for each variable.
Input Ports
The number of input ports depends on the number of variables specified in the Variables list. Each variable in the list is assigned a different inport port, in the order that they appear in the list. The data type and dimensions of each input are determined by the data type and dimensions of the corresponding variable.
Output Ports
This block has no output ports.
Data Type Support
The EtherCAT Write block supports the following EtherCAT data types, and arrays of these types:
EtherCAT Type
|
Simulink type
|
Range
|
Comment
|
|---|---|---|---|
BOOL
|
boolean | 0..1 | logical type |
BYTE
|
uint8 | 0..255 | |
WORD
|
uint16 | 0..65535 | |
DWORD
|
uint32 | 0..4294967295 | double word |
SINT
|
int8 | -128..127 | signed "short" integer |
USINT
|
uint8 | 0..255 | unsigned "short" integer |
INT
|
int16 | -32768..32767 | signed integer |
UINT
|
uint16 | 0..65535 | unsigned integer |
DINT
|
int32 | -2147483648..2147483647 | signed "double" integer |
UDINT
|
uint32 | 0..4294967295 | unsigned "double" integer |
REAL
|
single | ±3.402823e38 | single-precision floating-point |
LREAL
|
double | ±1.79769313486232e308 | double-precision floating-point |
TIME
|
uint32 | 0..4294967295 | milliseconds |
TIME_OF_DAY (TOD)
|
uint32 | 0..4294967295 | seconds |
DATE
|
uint32 | 0..4294967295 | seconds since January 1, 1970 |
DATE_AND_TIME (DT)
|
uint32 | 0..4294967295 | seconds since January 1, 1970 |
AMSADDRESS
|
uint8 | 0..255 | 48 bit address presented as a 6-vector of bytes |
Parameters and Dialog Box
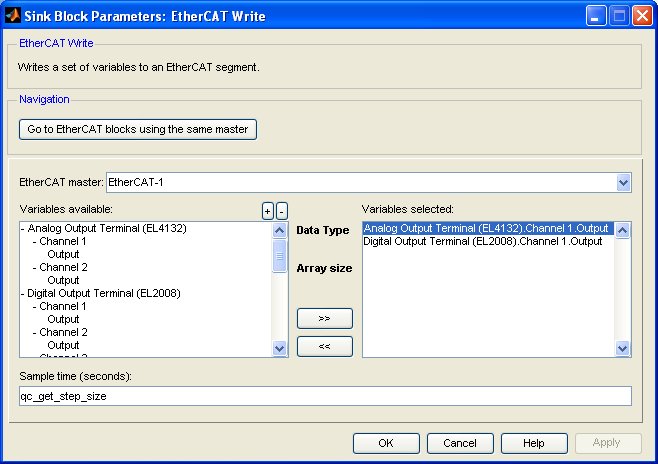
The Main pane of the dialog appears is shown above.
EtherCAT master
The name of the EtherCAT master whose process image variables will be read. EtherCAT masters are configured using the EtherCAT Master block. Place an EtherCAT Master block in your diagram to add an EtherCAT master to the list.
Variables
The variables to write. The number of variables available depends on the EtherCAT master selected and the number of process variables defined in its corresponding XML configuration file. The input units depend on the variables selected. There is one input port for each variable in the list and the input ports are assigned in the same order as the variable list.
To add a variable to the list, choose the variable in the pop-up menu (combobox) that appears immediately below the list of variables. Then click on the button to add the selected variable to the end of the list. The data type and length of the variable will be displayed in the information area to the right of the list of variables.
To remove a variable from the list, click on the variable in the list. (Do not select the variable in the pop-up menu that appears immediately below the list of variables.) Then click on the button to remove the selected variable from the list. Use the Ctrl key to select more than one variable in the list and the Shift key to select a range of variables in the list. Then click on the button to remove all the selected variables from the list.
Sample time
The sample time of the block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time.
A sample time of -1 indicates that the block inherits its sample time from the input. The block inherits the sample time by default.
To set the sample time to the fundamental sampling time of the model, use the qc_get_step_size function, which is a QUARC function that returns the fundamental sampling time of the model. The fundamental sampling time of the model is the sampling time entered in the Fixed step size field of the Solver pane of the Configuration parameters.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
No |
No |
Not currently supported. |
|
|
No |
No |
Not currently supported. |
|
|
No |
No |
Not currently supported. |
|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
No |
No |
Not currently supported. |
|
|
No |
No |
Not currently supported. |
|
|
No |
No |
Not currently supported. |
|
|
No |
No |
Not currently supported. |
|
|
No |
No |
Not currently supported. |
|
|
No |
No |
Not currently supported. |
|
|
No |
No |
Not currently supported. |
|
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
No |
No |
Not currently supported. This block does nothing during rapid simulation. |
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
No |
No |
Not currently supported. This block does nothing during normal simulation. |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.