
HIL Watchdog Clear
Clears the watchdog state so that I/O may be performed again.
Library
QUARC Targets/Data Acquisition/Generic/Watchdog MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Data Acquisition/Generic/Watchdog')
Description

The HIL Watchdog Clear block clears the watchdog state after the watchdog timer has expired. When the watchdog timer is allowed to expire, it disables further output to the card so that other HIL blocks in the model cannot write to the outputs of the card and disrupt the safe values programmed by the watchdog timer. In order to resume normal operation, the HIL Watchdog Clear block must be invoked to clear this watchdog state. This block is normally executed in a Triggered Subsystem because it clears the watchdog state every time it executes.
Input Ports
This block has no input ports.
Output Ports
This block has no output ports.
Parameters and Dialog Box
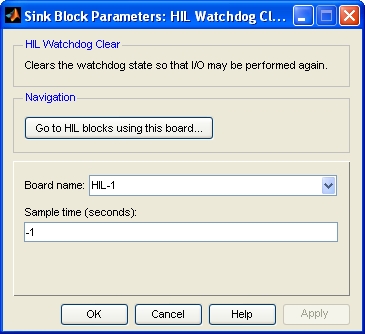
Board Name
The name of the board whose watchdog state will be cleared. Boards are configured using the HIL Initialize block. Place an HIL Initialize block in your diagram to add a board name to the list.
Sample time
The sample time of the block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time.
A sample time of -1 indicates that the block inherits its sample time. Since this is a source block, only inherent the sample time when it is placed in a conditionally executed subsystem, like a Triggered or Enabled Subsystem, or in a referenced model.
The default sample time is set to -1, since this block is normally executed in a Triggered Subsystem.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
No |
No |
Not supported. The watchdog state cannot be cleared on the gumstix. |
|
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Due to safety and liability concerns, the hardware may not be accessed during normal simulation. |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.