
LIDAR Scan Match
Matches LIDAR scans to determine the transformation between the reference scan and the current scan.
Library
QUARC Targets/Image Processing/Generic MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Image Processing/Generic')
Description
The LIDAR Scan Match block matches a reference LIDAR scan to a current LIDAR scan and uses a grid matching algorithm to determine the translation and rotation of the current LIDAR scan relative to the reference scan. Both current and reference scans may change at each sampling instant.
Input Ports
refrng
A vector of range values for the reference scan.
refang
A vector of angle or headnig values for the reference scan.
reflen
The number of valid points in the reference scan. This input is only present when the mode parameter is set to Fixed-input with size.
currng
A vector of range values for the current scan.
curang
A vector of angle or headnig values for the current scan.
curlen
The number of valid points in the current scan. This input is only present when the mode parameter is set to Fixed-input with size.
initial
The initial pose as a 3-vector at which to start the grid search. The translation search range and rotation search range are relative to this initial pose. The pose consists of the elements [x, y, theta] where x and y denote the translation in meters and theta denotes the rotation in radians.
trans
The translation search range as a 2-vector [x,y] indicating the cartesian search range in meters.
rot
The rotation search range as a scalar indicating the angular search range in radians.
Output Ports
pose
The pose as a 3-vector [x,y,theta] representing the transformation between the current scan and the reference scan. The (x,y) components are the translation and the theta component is the rotation.
score
A score representing the confidence in the match. Higher values denote higher confidence. The value is not normalized so it is highly dependent on the input scans and block parameters.
cov
A 3x3 matrix representing an estimate of the covariance of the result. This output is currently set to zero but may be added in future revisions.
err
A negative error code or zero on success.
Data Type Support
The LIDAR Scan Match block supports any of the standard Simulink data types at its inputs. Fixed-point data types are not supported. The pose, score and cov outputs are single. The err output is an int32.
Parameters and Dialog Box
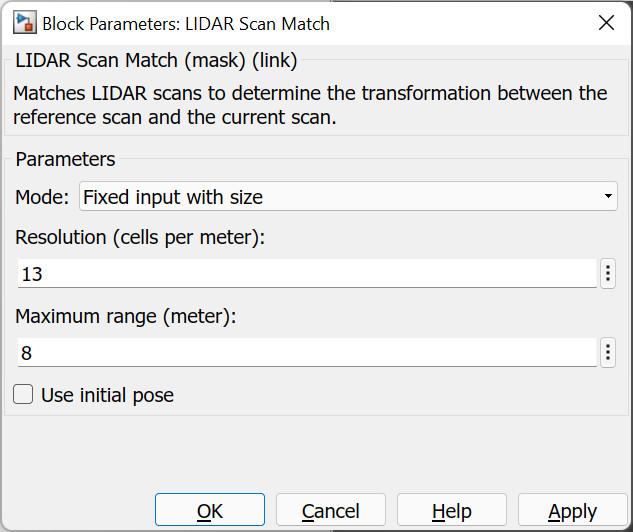
mode
The mode determines the nature of the inputs. In Fixed-input with size mode the scans are input as a vector of ranges and angles, with a length input indicating how many of the points are actually valid in each vector.
In Variable-size mode, the scans are input as a variable-size vector of ranges and angles. Since variable-size signals have an inherent length, no length input is provided.
Resolution (tunable offline)
The resolution is a scalar value representing the number of grid cells per meter. The LIDAR scan is divided into a grid of cells, with the given resolution, and then these grid elements are evaluated to see which one is most likely to be the location of the current scan relative to the reference scan.
Maximum range (tunable offline)
The maximum range to allow in the LIDAR scans. Any values beyond this range are discarded. The range is a scalar value in meters.
Use initial pose
If this option is checked then three extra inputs are provided: initial, trans and rot representing the initial pose, translation search range in meters, and rotation search range in radians. The grid search is initiated at the given initial pose and extends up to the given ranges from that point.
If this option is not checked, then the algorithm searches the entire grid space defined by the Maximum ranga parameter (over a 360 degree rotation).
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.