
PA10 Control
Sends joint velocity or torque commands to the PA10 robot and outputs the angles, velocities, and torques for each joint.
Library
QUARC Targets/Devices/Third-Party/Mitsubishi/Robots/PA10/Interfacing MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Devices/Third-Party/Mitsubishi/Robots/PA10/Interfacing')
Description
The PA10 Control block sends velocity or torque commands for each joint of the PA10 robot. Each joint can be independently enabled or disabled and independently controlled. The PA10 supplies angles, velocities and torques for each joint as well as alarm codes, which are output by the PA10 Control block. This block can be used with the 6-DOF and 7-DOF PA10 robots.
Note that the PA10 Control block utilizes the ARCNET protocol to communicate with the PA10 robot. If the ARCNET card is connected to a network with no other nodes present the model will block as soon as it is started. In normal simulation this may cause MATLAB to hang indefinitely, and in external mode the model must be stopped by the user, at which point an error message will be displayed indicating that the initialization failed. Please ensure the ARCNET card is properly connected to the PA10 controller for proper operation.
The reference frame is shown below:

Input Ports
joint velocity/torque
A vector (6 or 7 elements long if used in 6-DOF or 7-DOF mode, respectively) containing the joint velocity commands (in rad/s) or joint torque commands (in N-m) for each joint of the robot.
enable
A vector (6 or 7 elements long if used in 6-DOF or 7-DOF mode, respectively) of boolean values indicating whether each joint is enabled (true) or disabled (false).
Output Ports
joint angles
A vector (6 or 7 elements long if used in 6-DOF or 7-DOF mode, respectively) of the joint angles in radians.
joint vel
A vector (6 or 7 elements long if used in 6-DOF or 7-DOF mode, respectively) of the joint velocities in rad/s.
joint torques
A vector (6 or 7 elements long if used in 6-DOF or 7-DOF mode, respectively) of the joint torques in N-m.
alarm codes
A vector (6 or 7 elements long if used in 6-DOF or 7-DOF mode, respectively) of the joint alarm codes returned from the PA10. See the PA10 Instruction Manual for Servo Driver for alarm code details.
Data Type Support
The joint commands are of type double and the enable signal
elements are of type boolean. The outputs are all of type
double except for the alarm codes, which are of type uint16.
Parameters and Dialog Box
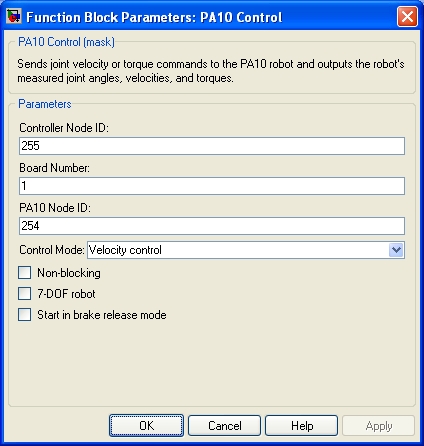
Controller Node ID
The ARCNET node ID of the local controller sending commands to the PA10. The PA10 documentation requires this ID to be 255.
Board Number
The ARCNET board number in the local controller. The default value is 1.
PA10 Node ID
The ARCNET node ID of the PA10 controller. The PA10 documentation requires this ID to be 254.
Control Mode
This option selects whether the joint commands given as an input to this block are to be used for velocity control or for torque control. Note that each control mode utilizes the same input signal so it is crucial that the user checks to make sure they are operating in the correct control mode.
Non-blocking
This option selects whether the block operates using non-blocking communication methods. The default operation is blocking, and the block may be placed in an asynchronous thread to avoid missed samples if the sampling rate is high.
7-DOF robot
Select this option if the PA10 is the 7-DOF model, otherwise it is assumed to be the 6-DOF PA10 model.
Start in brake release mode
Select this option to start the PA10 in brake release mode. If this option is selected,
the enable vector signal will enable or disable the joint brakes and all velocity
commands will be ignored. This mode is useful for repositioning the PA10 when it has moved
to a point beyond the joint angle limits and cannot be engaged in normal control mode.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
||
|
No |
No |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
No |
No |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
No |
No |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.