
QBot 2 Joint Velocities to Chassis Velocities
Converts joint velocities to chassis velocities for the Quanser QBot 2/2e mobile robot.
Library
QUARC Targets/Devices/Quanser/Mobile Robots/QBot 2 MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Devices/Quanser/Mobile Robots/QBot 2')
Description
The QBot 2 Joint Velocities to Chassis Velocities block converts joint velocities, which are the velocities in meters per second of the right and left wheel, to chassis velocities for Quanser QBot 2/2e robot. Chassis velocities consist of the linear velocity of the robot's origin, and the angular velocity about that origin. The Quanser QBot 2/2e axes conform to the Quanser Standard Axes.
Input Ports
right
The velocity of the right wheel in m/s. This port is only visible if the Vector input option is not checked.
left
The velocity of the left wheel in m/s. This port is only visible if the Vector input option is not checked.
wheels
The velocity of the right and left wheels in m/s as a 2-vector. The first element must be the velocity of the right wheel and the second element the velocity of the left wheel. This port is only visible if the Vector input option is checked.
Output Ports
linvel
The linear (translational) velocity of the chassis in m/s.
angvel
The angular (rotational) velocity of the chassis in rad/s.
ang
The angular position of the chassis in rad, based on integration of the angular velocity. This port is only visible if the Output angular position option is checked.
Data Type Support
This block supports inputs and outputs of type double.
Parameters and Dialog Box
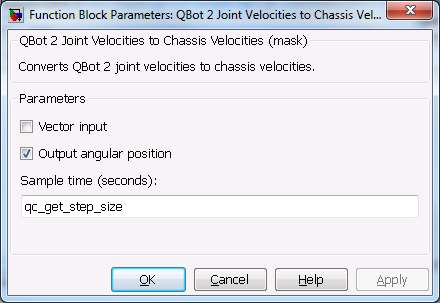
Vector input
Check this option to change the input to a vector input for both wheels, rather than a scalar input for each wheel velocity.
Output angular position
When this option is checked, an additional ang output is provided which supplies the angular position of the chassis based on integration of the angular velocity. This option is mainly for convenience when combining the QBot 2 Joint Velocities to Chassis Velocities block with the kinematics blocks.
Sample time
The sample time of the block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time.
A sample time of -1 indicates that the block inherits its sample time from its inputs. The sample time cannot be inherited if the Output angular position option is checked because integration is required to produce the angular position.
To use the fundamental sampling time of the model, set the sample time to qc_get_step_size , which is a QUARC function that returns the fundamental sampling time of the model.
The default sample time is set to qc_get_step_size.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.