Roomba Play Song
Plays the specified song.
Library
QUARC Targets/Devices/Third-Party/iRobot/Roomba/Interfacing MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Devices/Third-Party/iRobot/Roomba/Interfacing')
Description
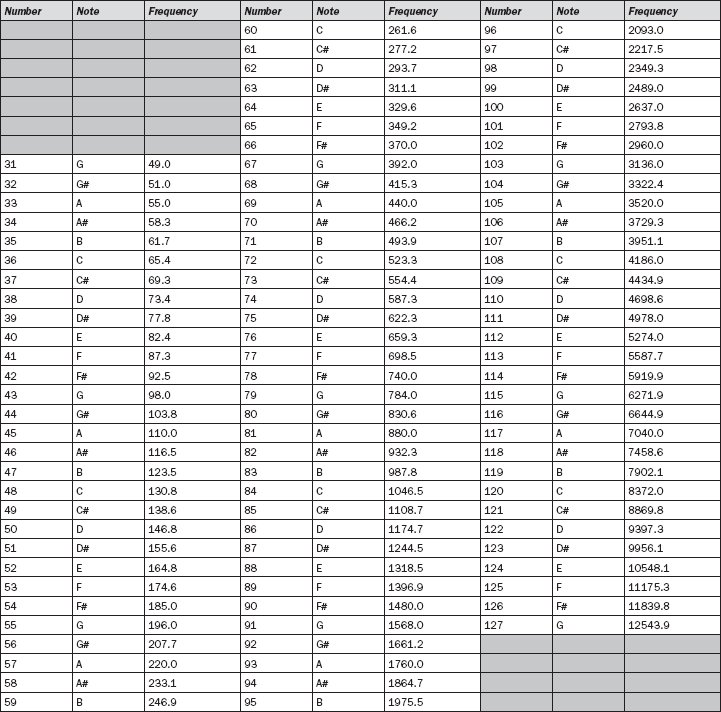
The Roomba Play Song specifies and plays a song. The first byte specifies the song number (0 to 15). The second byte indicates the number of notes
in the song (1 to 16). Each song can contain up to sixteen notes. Each note is associated with a note number (31 to 127) that uses MIDI note
definitions and a duration (0 to 255) that is specified in fractions (1/64) of a second. For example, [0 1 55 32] specifies a song with song
number 0, song length (number of notes) 1, note number 55, and duration 32 (half second). The following table specifies Roomba musical notes:
|
|
|
Source: iRobot Create Open Interface v.2 Manual |
This command is available in Passive, Safe, or Full operating mode of Roomba (see Roomba Modes block). Execution of this command does not change current Roomba operating mode.
Important Notes
 Use System Timebase
block in Normal simulation.
Use System Timebase
block in Normal simulation.
Input Ports
rmb
A reference to the Roomba stream (see Roomba Initialize block).
song_info
Output Ports
rmb
A reference to the Roomba stream, which is the same as input Roomba stream reference. It helps creating a daisy chain of Roomba blocks.
err
Parameters and Dialog Box

Sample time
The sample time of the block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time. A sample time of -1 indicates that the block inherits its sample time.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Use System Timebase. |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.