
Video3D Extrinsics
Gets the extrinsic transformation from one Video3D image sensor to another.
Library
QUARC Targets/Multimedia MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Multimedia')
Description
The Video3D Extrinsics block outputs the homogeneous transformation mapping the physical location of one image sensor to another in an RGBD camera. Each sensor is identified by the Video3D Capture block that is outputting the image from the sensor.
The homogeneous transformation takes the form:
|
R |
d |
|
0 |
1 |
where R is a 3x3 rotation matrix and d is a translation vector. QUARC has a number of blocks supporting operations on homogeneous transformation matrices of this form. The translations are in meters.
Input Ports
This block has no input ports.
Output Ports
trans
The homogeneous transform from one image sensor to another as a 4x4 single-precision matrix.
Parameters and Dialog Box
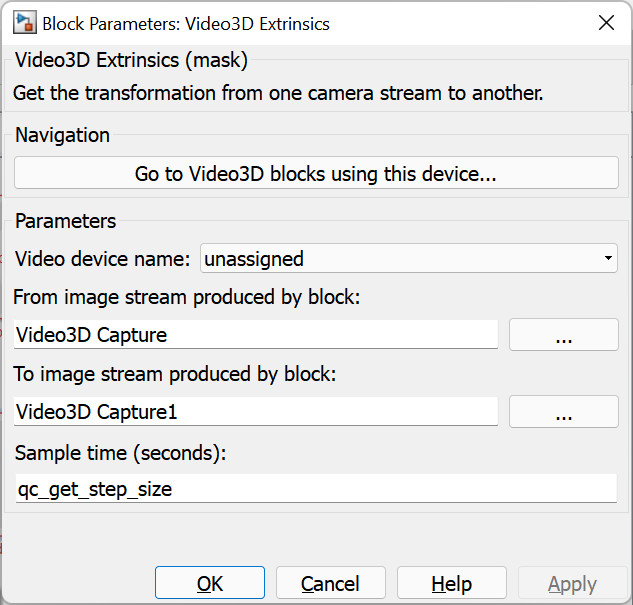
Video device name
The identity of the associated Video3D Initialize block. The Video3D Extrinsics block must be associated with a Video3D Initialize block. This parameter will show a list of all the Video3D Initialize blocks in the diagram or "unassigned".
From image stream produced by block
The full path to the Video3D Capture block representing the image sensor serving as the starting point for the transformation.
To image stream produced by block
The full path to the Video3D Capture block representing the image sensor serving as the ending point for the transformation.
Sample time
The sampling period (in seconds) of the Video3D Extrinsics block. A sample time of 0 indicates that the block will be treated as a continuous time block. A positive sample time indicates that the block is a discrete time block with the given sample time. The sample time cannot be inherited.
The default sample time is set to qc_get_step_size * ceil(0.033 / qc_get_step_size). The qc_get_step_size function is a QUARC function that returns the fundamental sampling time of the model. Hence, the default sample time is a discrete sample time which is a multiple of the fixed step size of the model and close to 1/30 of a second.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
No |
No |
Not supported. |
|
|
No |
No |
Not supported. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
Fully supported. |
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
Fully supported. |
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.