
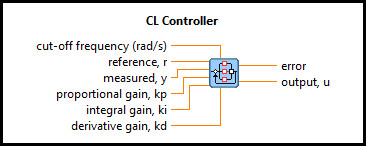
CL Controller
| Owning Palette: | Continuous |
| Requirements: | Quanser Rapid Control Prototyping Toolkit, LabVIEW 2022 or newer, Control Design and Simulation Module |
Description
This VI implements three commonly used controllers: Proportional-Integral-Derivative (PID), Proportional-Integral-Velocity (PIV), and PD with Acceleration Feed-Forward.
Polymorphic Instances
| CL Controller (PID) | ||
| CL Controller (PIV) | ||
| CL Controller (PD with FF) |
Examples
| RCP CL Controller PV Example | This example demonstrates the use of RCP CL Controller using PV gains. |
Targets
|
Target |
Supported |
Comments |
|---|---|---|
|
Yes |
Fully supported. |
Copyright © Quanser Inc. This page was generated 2024-11-15. Submit feedback to Quanser about this page.
Link to this page.