
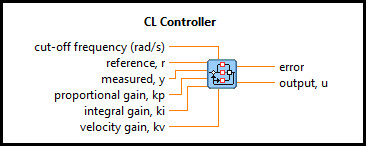
CL Controller (PIV)
| Parent Polymorphic VI: | CL Controller |
| Requirements: | Quanser Rapid Control Prototyping Toolkit, LabVIEW 2022 or newer, Control Design and Simulation Module |
Description
Produces a control signal that drives the system to the reference value based on the deviation between the measured value and the reference using Proportional-Integral-Velocity (PIV) control.
Recommended Inputs or Dialog Box Options  Recommended inputs need not to be wired. They may be selected to appear as terminals or dialog parameters, but show up as terminals by default.
They appear in simple text in the context help window for the VI.
Recommended inputs need not to be wired. They may be selected to appear as terminals or dialog parameters, but show up as terminals by default.
They appear in simple text in the context help window for the VI.

|
cut-off frequency is the high-pass filter cut-off frequency (in rad/s) used to determine the velocity of y. |
|
|
reference, r is the reference signal, e.g. desired position or velocity of a DC motor. |
|
|
measured, y is the measured signal, e.g. motor position. |
|
|
proportional gain, kp is multiplied by the error between the reference and measured signals and added to the final output. |
|
|
integral gain, ki is multiplied by the integral of the error between the reference and measured signals and added to the final output. |
|
|
velocity gain, kv is multiplied by the measured velocity of the system and added to the final output. |
Outputs

|
error is the difference between the reference and measured signals, i.e. e = r - y. |
|
|
output, u is the controller output signal. |
Details
The PIV control loop is depicted below and has the following structure: u = kp (r-y) + ki (r-y)/s - kv s y. The direct derivative is not taken to minimize the noise in the control output. Instead, the first-order high-pass filter ωf s/(s+ωf) is used to compute the velocity of the error, where ωf is the cut off frequency. Unlike the PID control, PIV feeds back only the measured velocity (i.e. not the velocity of the error), which can lead to less overshoot in the closed-loop response.

Feedthrough Behaviour
All input/output pairs of this function have direct feedthrough behaviour.
Examples
| RCP CL Controller PV Example | This example demonstrates the use of RCP CL Controller using PV gains. |
Targets
|
Target |
Supported |
Comments |
|---|---|---|
|
Yes |
Fully supported. |
Copyright © Quanser Inc. This page was generated 2024-11-15. Submit feedback to Quanser about this page.
Link to this page.