
RCP CL Phantom Example
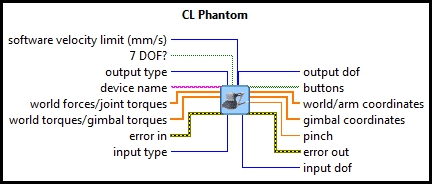
This example demonstrates how to use the CL Phantom VI to control the family of Phantom haptic devices. All these devices have 6 degree-of-freedom (DOF) outputs (encoders) to read, and 3 or 6-DOF inputs (actuators) to control. Please refer to the Quick Start Guide to get you set up with the hardware.
For a detailed description of this VI and how it operates, please refer to the RCP CL Phantom help pages.
Installation Requirements
Please refer to the Installation Requirements in RCP CL Phantom help page.
Running the Example
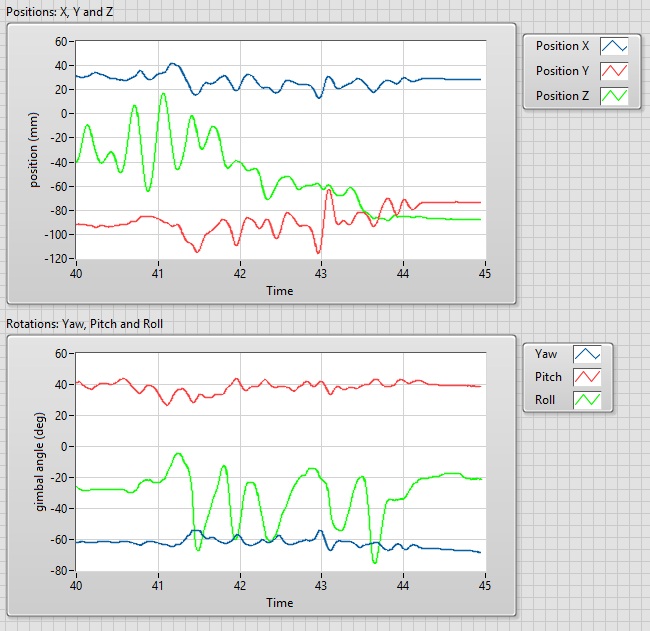
Click on the VI button or select from the menu to start the VI. The Phantom VI can send commands in two different coordinate spaces to the Phantom device: Cartesian Space and Joint Space. In this example, the VI sends Cartesian forces to the robot. If the device is 6-DOF then roll, pitch, and yaw torque commands are also sent to the device gimbal. The VI also outputs the position of the device arm, joint and gimbal angles of the device. The units for position measurements are millimetres and the units for angular measurements are degrees. All forces are in Newtons.
Use the Sliders to send Cartesian forces to the robot. Facing the device, toward the user is the positive x-axis, right is the positive y-axis and up is the positive z-axis. The order of the elements is X, Y and Z.
Click on the Front Panel button to stop the VI.
Copyright © Quanser Inc. This page was generated 2024-11-15. Submit feedback to Quanser about this page.
Link to this page.