
Mavlink Receive
Receives data over a Mavlink connection.
Library
QUARC Targets/Communications/Mavlink MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Communications/Mavlink')
Description
The Mavlink Receive block receives packets over a Mavlink connection. The Mavlink connection is established using a Mavlink Initialize block. The Mavlink connection is referenced by name via the Connection name parameter.
When the Mavlink connection is configured as a UDP server then the Mavlink Receive block is able to receive packets from more than one drone at the same time. To do so, specify more than one system identifier in the System identifier(s) parameter.
Input Ports
This block has no input ports.
Output Ports
new
A vector indicating whether the data for each system is new. There is one element for each system.
err
An int32 value indicating whether the data was read from the stream buffer successfully.
If an error occurs then this value is a negative error code. The reception of a packet
is non-blocking, so if a packet is not received for any system then -QERR_WOULD_BLOCK
is output. See Error Codes for the different error
codes and their values. Use the Compare to Error
block rather than the error code itself to check for specific error codes. To check for errors in general
use the Compare to Zero block to check whether err
output is less than zero.
..
There will be an additional output for each field of the Mavlink message being received. The data type and dimension of the output depends on the data type and length of the field. Most fields are scalars, so the output will be a vector with one element for each system. If the message field is an array then the output will be a matrix with one column for each system. If only one system is specified then scalar fields are output as a scalar and array fields are output as a vector.
Data Type Support
The Mavlink Receive block supports signals of any of the standard Mavlink data types at its outputs. Array fields are supported.
Parameters and Dialog Box
Individual Panes
The parameters of the Mavlink Receive block are divided into two categories: Main and Outputs.
The Main tab contains the parameters that affect the block functionality.
The Outputs tab provides more detailed information on each of the outputs of the block that are specific to the selected message.
Use the links below to jump to the documentation for each tab:
Main Pane
The Main pane of the dialog appears as follows:
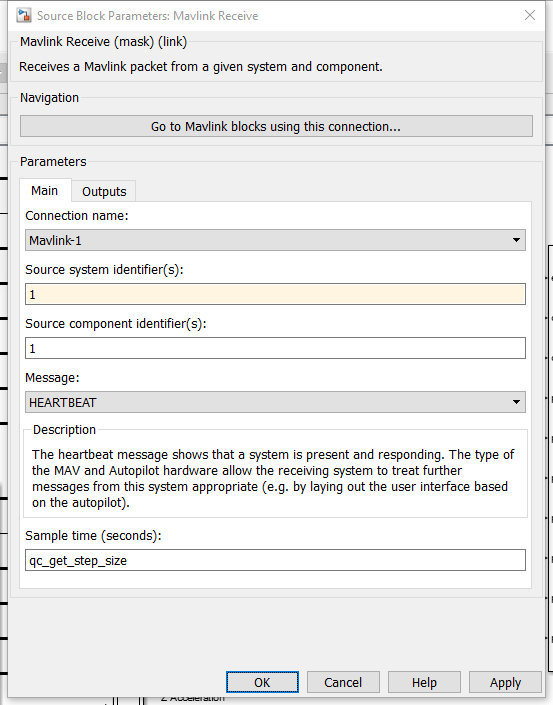
Connection name
The name of the connection from which Mavlink packets will be received. Connections are configured using the Mavlink Initialize block. Place a Mavlink Initialize block in your diagram to add a connection name to the list.
System identifier(s)
The identifiers of the systems from which to receive packets. Only a single system identifier may be specified unless the block is configured as a UDP server. The system identifier of each drone must be unique. QGroundControl may be used to set the system identifier of a drone. Drones typically default to a system identifer of 1.
Component identifier(s)
The identifiers of the component on each system from which to receive packets. Systems may contain multiple components so the component identifier must also be specified. Only a single component identifier may be specified unless the block is configured as a UDP server. Components within a drone must be unique, but need not be unique across systems. Drones typically only have one component whose default identifer is 1.
Message
The Mavlink message to receive. The list of messages is determined by the message definition file referenced by the Mavlink Initialize block which defines the connection. Changing this parameter will redefine the outputs of the block to match the fields of the selected Mavlink message.
Outputs Pane
The Outputs pane of the dialog appears as follows:
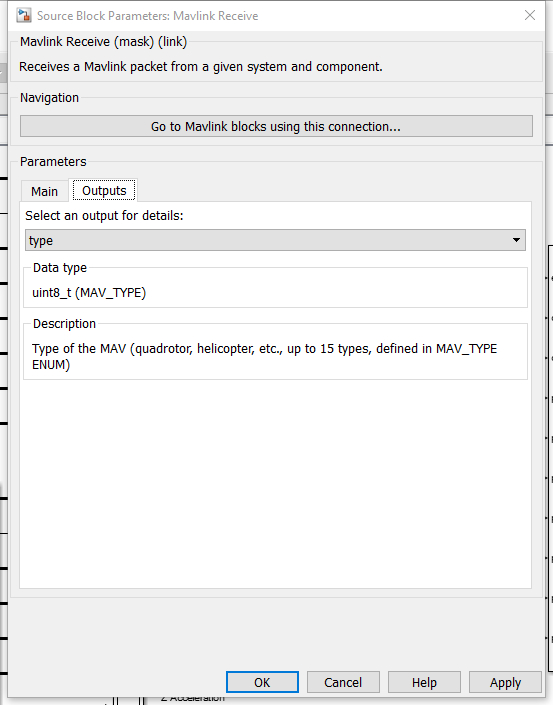
Select output for details
Choosing an output from the list updates the data type and description areas with information about the selected output. This parameter does not affect the functionality of the block and is only provided for documentation purposes.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
If the Mavlink Initialize block which created the connection is not active during normal simulation, then the Mavlink Receive block does nothing. Otherwise it receives packets from the connection. |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.