
Rotation Transformation
This block multiplies a homogeneous transformation matrix by a rotation matrix. The block can be configured to have either a fixed or variable rotation axis and a fixed or variable rotation angle.
Library
QUARC Targets/Math Operations/Homogeneous Transformations MATLAB Command Line Click to copy the following command line to the clipboard. Then paste it in the MATLAB Command Window: qc_open_library('quarc_library/Math Operations/Homogeneous Transformations')
Description
This block multiplies an input homogeneous transformation matrix by a rotation matrix. The block can be configured to have either a fixed or variable rotation axis and a fixed or variable rotation angle by double clicking on the block and setting the appropriate parameters. The homogeneous rotation matrix is as follows:
output = [(x^2*(1-cos(ang))+cos(ang)) (y*x*(1-cos(ang))-z*sin(ang)) (z*x*(1-cos(ang))+y*sin(ang)) 0
(x*y*(1-cos(ang))+z*sin(ang)) (y^2*(1-cos(ang))+cos(ang)) (z*y*(1-cos(ang))-x*sin(ang)) 0
(x*z*(1-cos(ang))-y*sin(ang)) (y*z*(1-cos(ang))+x*sin(ang)) (z^2*(1-cos(ang))+cos(ang)) 0
0 0 0 1];
where x, y, and z are the elements of the rotation axis, and ang is
the rotation angle. The input homogeneous transformation matrix is post-multiplied by this matrix.
Input Ports
4x4
This input takes the previous output from a homogeneous transformation block. If there are no prior transformation blocks then this input must be driven by a Identity Transformation block.
vec
If the block is configured to drive the rotation axis externally, then this port will be visible. The input should be a 3 element vector defining the axis of rotation. The vector will automatically be normalized by the block. The vector cannot be [0 0 0].
ang
If the block is configured to drive the rotation angle externally, then this port will be visible. The input should be a scalar to define the amount of rotation in radians about the defined rotation axis.
Output Ports
4x4
Outputs a 4x4 tranformation matrix.
Parameters and Dialog Box
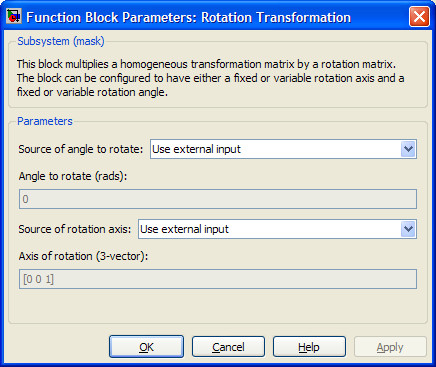
Source of angle to rotate
Selects between internal and external sources for the rotation angle. If internal is selected, set the angle in the Angle to rotate field. If external is selected, you can connect a scalar input to the input port.
Angle to rotate
Sets the amount of rotation (in radians) to the fixed value entered in this field if the Source of angle to rotate is set to use the internal input.
Source of rotation axis
Selects between internal and external sources for the rotation axis. If internal is selected, set the axis in the Axis of rotation field. If external is selected, you can connect a 3 element vector to the input port.
Axis of rotation
Sets the axis of rotation to the fixed value entered in this field if the Source of rotation axis is set to use the internal input.
Targets
|
Target Name |
Compatible* |
Model Referencing |
Comments |
|---|---|---|---|
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
||
|
Yes |
Yes |
Last fully supported in QUARC 2018. |
|
|
Rapid Simulation (RSIM) Target |
Yes |
Yes |
|
|
S-Function Target |
No |
N/A |
Old technology. Use model referencing instead. |
|
Normal simulation |
Yes |
Yes |
See Also
Copyright ©2026 Quanser Inc. This page was generated 2026-05-13. Submit feedback to Quanser about this page.
Link to this page.