
Abort Execution Functionality
The Quanser Rapid Control Prototyping (RCP) Toolkit changes the default functionality of the LabVIEW
Abort Execution button with respect to setting the data acquisition (DAQ) device outputs
when a VI is aborted and stops running.

When using the RCP Toolkit, the final values of all physical outputs (e.g., analog, digital, PWM) of an RCP-supported DAQ device
are safely zeroed, or set to any other pre-determined desired value, when the VI is aborted (or stopped).
The desired final output values are user-defined in the Final output entry fields
of the RCP HIL Initialize VI.
The RCP Abort Execution functionality can be demonstrated by running the
RCP Position Control Example.
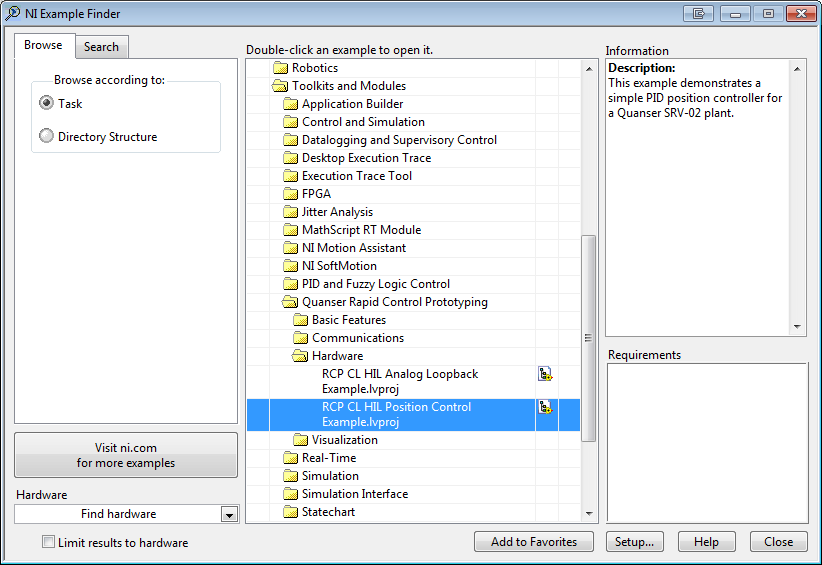
As described in the RCP Position Control Example help page,
follow the steps to configure and run
the position controller VI for the Quanser's SRV02 rotary servo experiment.
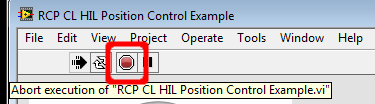
However this time instead of clicking on the Front Panel button
(which is still the recommended way) to stop the VI,
click on the VI Abort Execution button.
The DAQ analog output will be zeroed and Quanser's SRV02 plant will come to a safe stop!
Therefore whether a VI was stopped appropriately or aborted unexpectedly, all of the outputs are zeroed (or set to a predefined desired value) by the Quanser RCP Toolkit when the controller stops running. This supervisory safety feature is crucial, for example, in an undergraduate teaching laboratory environment where students may be unfamiliar with proper programming practices.
Copyright © Quanser Inc. This page was generated 2024-11-15. Submit feedback to Quanser about this page.
Link to this page.