
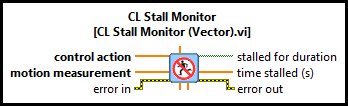
CL Stall Monitor (Vector)
| Parent Polymorphic VI: | CL Stall Monitor |
| Requirements: | Quanser Rapid Control Prototyping Toolkit, LabVIEW 2022 or newer, Control Design and Simulation Module |
Description
CL Stall Monitor monitors whether a device has stalled. It is typically used to protect a device from overheating by stopping the VI if the device is stalled for too long.
Required Inputs  All required inputs must be wired. They always appear as terminals on the VI palette. They also appear in bold text in the context help window for the VI.
All required inputs must be wired. They always appear as terminals on the VI palette. They also appear in bold text in the context help window for the VI.

|
control action is the control applied to the device. For example, this input may be the voltage applied to a servomotor. |
|
|
motion measurement is the measured motion of the device being controlled. For example, this input may be the measured velocity of a servomotor in rad/s. |
Optional Inputs or Dialog Box Options
Optional inputs need not to be wired. They may appear as terminals or dialog parameters, but show up as dialog parameters by default.
They are indicated but not labelled in the context help window for the VI.
|
|
control threshold is the threshold above which the control action is considered high. For example, if the control action is a voltage then the threshold would typically be the voltage corresponding to the continuous stall torque, which should not be exceeded in a stall condition. |
|
|
motion threshold is the threshold below which the motion measurement is considered stopped. It is typically set to the minimum velocity that can be measured for the device. For example, it may be the minimum angular velocity measurable for a servomotor in rad/s. |
|
|
duration (s) is the time in seconds for which the device is allowed to be stalled. This input is usually set to the maximum time the device can be stalled before overheating, reduced by a safety margin. |

|
error in describes error conditions occurring before the VI executes. If an error has already occurred, the VI returns the value of the error in cluster in error out.
|



Outputs

|
stalled for duration indicates whether the device has been stalled for the given duration or longer. A device is considered stalled when the control action exceeds the control threshold, but the motion measurement is less than the motion threshold. In other words, a large control signal is being applied but the device is not moving. |
||||||

|
time stalled (s) is the time in seconds for which the device has been stalled. This output is independent of the given duration so it counts up as long as the stall conditions are met. See the stalled for duration help for the stall conditions. |
||||||

|
error out contains error information. If the error in cluster indicated an error, the error out cluster contains the same information. Otherwise, error out describes the error status of this VI.
|



Details
CL Stall Monitor is typically used to protect a device from overheating. For example, a DC servomotor should not be stalled for too long when the torque exceeds the continuous stall torque. The CL Stall Monitor can detect when a large torque is applied but the device is not moving. If this state continues for too long, it outputs true at its stalled for duration terminal. This output can then be used to stop the VI, issue an error message or take other corrective action.
The stall condition is detected when the control action exceeds the control threshold but the motion measurement is less than the motion threshold. For example, if the control action is the torque applied to a servomotor then the control threshold should be set to the continuous stall torque from the motor specification. The motion measurement in this case should be the measured velocity of the motor and the motion threshold should be the smallest velocity that can be measured. Hence, when the motor is not moving (as indicated by the motion measurement being less than the motion threshold) but a large torque is being applied (as indicated by the control action exceeding the control threshold) then the motor is considered stalled.
As soon as a stall condition is detected, the time for which it is continuously stalled is output at the time stalled terminal. If this time exceeds the duration then the stalled for duration output becomes true and the error out indicates an error condition. The error out terminal may be used with a Report Simulation Error VI to stop the simulation and issue an error message. Be sure the error terminal of the CD&Sim loop is wired to an indicator so that the VI stops gracefully, shutting down any hardware accessed using the HIL VIs.
When the stall condition is not satisfied then the stalled for duration output will be false and the time stalled output will be zero.
Feedthrough Behaviour
All input/output pairs of this function have direct feedthrough behaviour.
Examples
| RCP CL Stall Monitor Example |
Targets
|
Target |
Supported |
Comments |
|---|---|---|
|
Yes |
Fully supported. |
Copyright © Quanser Inc. This page was generated 2024-11-15. Submit feedback to Quanser about this page.
Link to this page.