
HIL Task Read Encoder (Scalar)
| Parent Polymorphic VI: | HIL Task Read |
| Requirements: | Quanser Rapid Control Prototyping Toolkit, LabVIEW 2022 or newer |
Description
Reads from an encoder input channel of a HIL Task.
Required Inputs  All required inputs must be wired. They appear in bold text in the context help window for the VI.
All required inputs must be wired. They appear in bold text in the context help window for the VI.

|
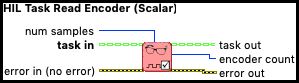
task in is a reference to a HIL Task instance that represents the created HIL task. This input must be wired to a valid HIL Task signal, as generated by a HIL Task Create Reader VI. |
Recommended Inputs
Recommended inputs need not be wired. They appear as simple text in the context help window for the VI.

|
num samples indicates the number of samples to read from the task buffer. Each "sample" consists of all the input channels specified when the task was created using HIL Task Create Reader VI. For example, if num samples is 5 and the task is configured to read 3 analog channels and 2 encoder channels, then the analog output buffer will contain 15 elements and the encoder output buffer will contain 10 elements. |

|
error in describes error conditions occurring before the VI executes. If an error has already occurred, the VI returns the value of the error in cluster in error out.
|



Outputs

|
task out is a copy of the HIL Task instance passed to the task in input. |
||||||

|
encoder count is the encoder count value read from the specified encoder channel when setting up in HIL Task Create Reader VI. |
||||||

|
error out contains error information. If the error in cluster indicated an error, the error out cluster contains the same information. Otherwise, error out describes the error status of this VI.
|


Details
This VI only reads one encoder input. When reading from mixed signal types, it is more efficient to use the
Feedthrough Behaviour
All input/output pairs of this function have direct feedthrough behaviour.
Examples
There are currently no examples
See Also
| HIL Task Create Reader | Create a task for reading from analog, digital, encoder and/or other channels of a HIL board. The task allows other operations to be performed while the inputs are being read "in the background". The data is read into an internal circular "task buffer" from which it can be read at any time using the HIL Task Read VI. The size of this task buffer is determined by the sample in buffer input. |
Targets
|
Target |
Supported |
Comments |
|---|---|---|
|
Yes |
Fully supported. |
Copyright © Quanser Inc. This page was generated 2024-11-15. Submit feedback to Quanser about this page.
Link to this page.