
CL HIL Read Encoder (Scalar)
| Parent Polymorphic VI: | CL HIL Read |
| Requirements: | Quanser Rapid Control Prototyping Toolkit, LabVIEW 2022 or newer, Control Design and Simulation Module |
Description
Reads from an encoder input channel of a HIL board.
Required Inputs  All required inputs must be wired. They always appear as terminals on the VI palette. They also appear in bold text in the context help window for the VI.
All required inputs must be wired. They always appear as terminals on the VI palette. They also appear in bold text in the context help window for the VI.

|
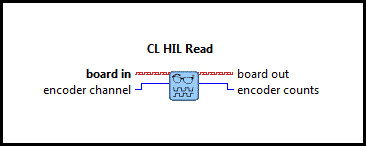
board in is a reference to a HIL Board instance that represents the open HIL board. This input must be wired to a valid HIL Board signal, as generated by a HIL Initialize VI. |
Recommended Inputs or Dialog Box Options
Recommended inputs need not to be wired. They may be selected to appear as terminals or dialog parameters, but show up as terminals by default.
They appear in simple text in the context help window for the VI.

|
encoder channel is a channel number indicating the encoder input channel to be read. The value read will appear at the encoder counts output. |
Outputs

|
board out is a copy of the HIL Board instance passed to the board in input. |

|
encoder count is the encoder count value read from the specified encoder channel. |
Details
This VI only reads one encoder input. When reading from mixed signal types, it is more efficient to use the
Feedthrough Behaviour
All input/output pairs of this function have direct feedthrough behaviour.
Examples
| RCP CL HIL Analog Loopback Example | This example is a simple analog loopback test, but it demonstrates a number of important features of RCP. | |
| RCP CL HIL Position Control Example | This example demonstrates how to use a PID controller to control Quanser's SRV02 experiment. |
See Also
| CL HIL Read Timebase | Reads from analog, digital, encoder and/or other channels of a HIL board while establishing the timing of the simulation loop via a hardware timebase. | |
| CL HIL Write | Writes to analog, digital, encoder and/or other channels of a HIL board. |
Targets
|
Target |
Supported |
Comments |
|---|---|---|
|
Yes |
Fully supported. |
Copyright © Quanser Inc. This page was generated 2024-11-15. Submit feedback to Quanser about this page.
Link to this page.